I-1000kg Smart Laser Navigation Electrical Automatic Stacker Forklift Agv Robot


I-1000kg Smart Laser Navigation Electrical Automatic Stacker Forklift Agv Robot
Udidi oluPhambili
Isithuthi esikhokelwa ngokuzenzekelayo se-AGV AMR / AGV / irobhothi yeselula ezimeleyo ye-AMR / i-AMR robot stacker / imoto ye-AMR yokuphatha izinto zoshishino / i-laser SLAM small stacker i-othomathikhi ye-forklift / indawo yokugcina impahla i-AMR / i-AMR laser SLAM navigation / irobhothi yeselula ye-AGV AMR / i-AGV AMR chassis laser SLAM navigation / i-forklift ezimeleyo engenamntu / i-warehouse AMR pallet fork stacker
Isicelo

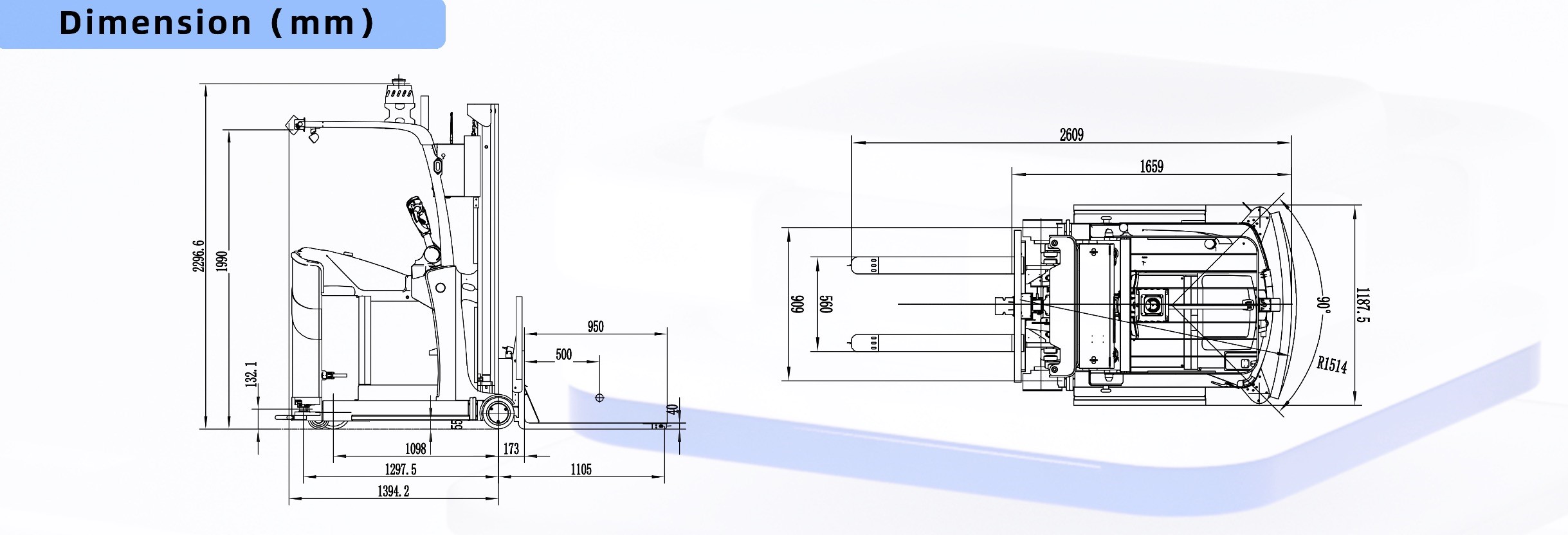
Ilori yokuphakamisa impahla i-SFL-CPD15-T ixhotyiswe nge-SRC Series Controller eyakhelwe ngaphakathi eyenziwe yi-SEER. Ingasasazwa ngokulula ngaphandle kwee-reflectors ngokusebenzisa i-Laser SLAM navigation, ithathwe ngokuchanekileyo nge-sensor yokuchonga i-pallet, iqhagamshelwe ngaphandle komthungo kwinkqubo yokuhambisa impahla. Le lori ye-forklift ye-warehouse ezenzekelayo yiyo ekhethwayo yokuhambisa impahla, ukupakisha kunye nokufaka ii-pallet kwifektri.
Ukwazisa iRobot Arm Robot Manual Industrial Six-Axis Collaborative Handling kunye nePalletizing Robot, isisombululo esiphambili esenzelwe ukuguqula iinkqubo zoshishino ngesandla. Le robot iphambili kakhulu idibanisa ukuchaneka, ukuguquguquka kunye nokusebenza kakuhle ukuze ilungelelanise imisebenzi yokuphatha kunye nepalletizing ngaphandle komthungo.
Ngoyilo lwayo oludibeneyo olunemiqolo emithandathu, le robhothi yokuphatha inika ukuhambahamba okungenakuthelekiswa nanto kunye nokuguquguquka, okwenza ukuba ibe lolona longezo lufanelekileyo kuyo nayiphi na indawo yemizi-mveliso. Nokuba usebenza kwimveliso, kwi-logistics, okanye kwindawo yokugcina impahla, le robhothi inokusingatha imisebenzi eyahlukeneyo ngokulula, ukusuka ekukhetheni nasekubekeni izinto ukuya ekufakeni izinto ezinzima kwiipalethi ngokuchanekileyo okukhulu.
Ingalo yerobhothi ixhotyiswe ngee-sensors zanamhlanje kunye neenkqubo zolawulo eziphambili ukuqinisekisa ukusebenza kakuhle kunye nokhuseleko ngamaxesha onke. Iimpawu zokusebenzisana zenza iirobhothi zisebenze kunye nabaqhubi babantu ngaphandle kokubeka impilo yabo esichengeni, ziphucule imveliso kwaye ziqinisekise indawo yokusebenza enobunye.
Ulwakhiwo lwerobhothi yokuphatha olukumgangatho wemizi-mveliso luqinisekisa ukuqina okuhlala ixesha elide, nokuba phantsi kweemeko zokusebenza ezinzima kakhulu. Ulwakhiwo lwayo olunamandla lwenjini kunye noomatshini oluqinileyo luvumela ukuba ikwazi ukusingatha imithwalo enzima ngokulula, nto leyo enciphisa kakhulu umngcipheko wokwenzakala emsebenzini kwaye yonyusa ukusebenza kakuhle ngokubanzi.
Enye yezona zinto zibalaseleyo zale robhothi yokuphatha yinkqubo yayo yokulawula ngesandla eqondakalayo. Abaqhubi banokuyilawula ngokulula irobhothi besebenzisa ujongano olusebenziseka lula, nto leyo evumela iintshukumo ezichanekileyo kunye nohlengahlengiso. Le nkqubo yokulawula eqondakalayo iqinisekisa iimfuno ezincinci zoqeqesho, ivumela abaqhubi ukuba bazivumelanise ngokukhawuleza nokusebenza kwerobhothi, ekugqibeleni inciphise ixesha lokungasebenzi kwaye yonyuse imveliso iyonke.
Ukongeza, irobhothi yokuphatha iyahambelana neentlobo ngeentlobo zee-effectors kwaye inokudityaniswa ngokulula kwimisebenzi ekhoyo, nto leyo eyenza ukuba ibe lutyalo-mali olungabizi kakhulu. Ukukwazi kwayo ukuziqhelanisa nemisebenzi eyahlukeneyo nokusebenza ngokungenamthungo nezinye iimatshini kuzisa ixabiso elingenakuphikiswa kuyo nayiphi na imisebenzi yemizi-mveliso.
Lilonke, iRobotic Arm Robot Manual Industrial Six-Axis Collaborative Handling kunye nePalletizing Robot sisisombululo esigqibeleleyo sokwenza ngcono iinkqubo zoshishino ezenziwe ngesandla. Ngokuchaneka kwayo, ukuguquguquka nokusebenza kakuhle, iqinisekisiwe ukuba iya kwandisa imveliso, ukhuseleko kwaye ekugqibeleni inyuse inzuzo. Hlangana nexesha elitsha lokuzenzekela kwezoshishino ngale ngalo yerobhothi ikumgangatho ophezulu.
Uphawu

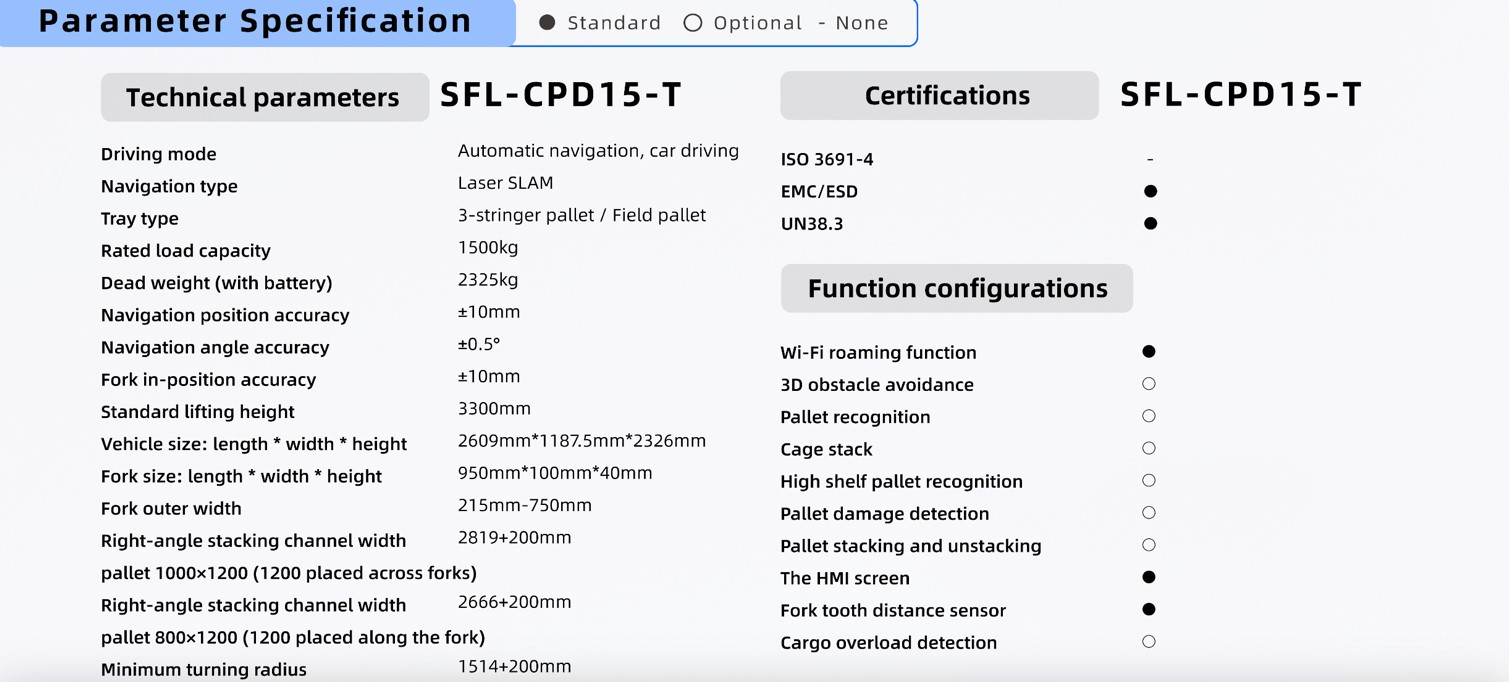
·umthamo womthwalo olinganisiweyo: 1500kg
·Ukuchaneka kwendawo yokukhangela: ± 10mm
·Ukuphakama kokuphakamisa: 3300mm
·Ubuncinci berediyasi yokujika: 1514 + 200mm
●Ukuhambahamba kwe-SLAM yeLaser yokwenyani
Ukuhamba ngendlela engenamkhondo ngaphandle kwee-reflectors kwenza kube lula kakhulu ukuyisebenzisa.
●Ukuqatshelwa okuchanekileyo
Ukuchongwa kwepalethi, ukuchongwa kwekheji kunye nokufakelwa kweefolokhwe ezichanekileyo zeempahla - zombini zisebenza kakuhle kwaye zikhuselekile.
●Umthamo woMthwalo we-1.5T
Iimpahla ezithwalwa ngomthwalo we-1.5T;
Phinda uchaze ukuchaneka kwenqaku: ±10mm kunye ±0.5°.
●Ukufuduka okuguquguqukayo kunye nokuCwangcisa
Uyilo oluncinci kunye nobubanzi obuncinci bokujiya kweendlela ezimxinwa; ucwangciso oluguquguqukayo lokufikelela ngaphandle komthungo.
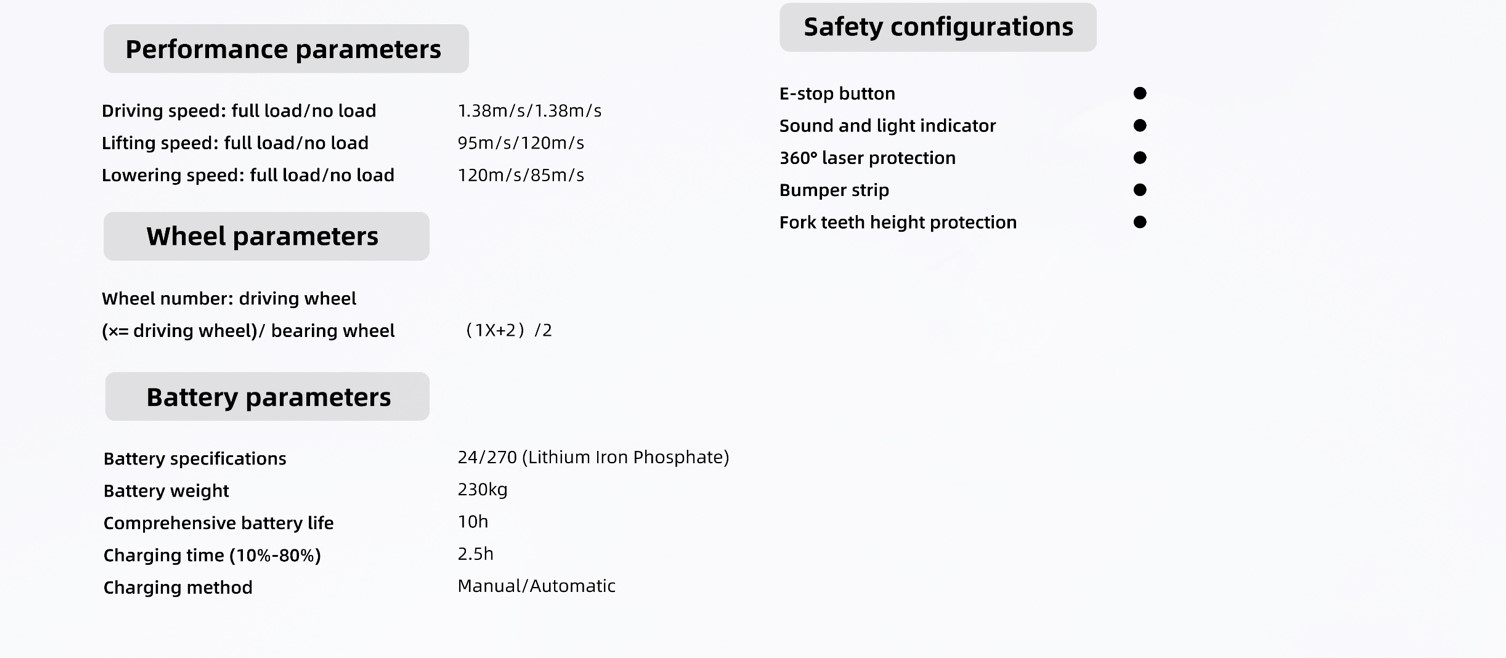
●Ukhuseleko olupheleleyo lwenza ukuba ikhuseleke ngokwenene
I-laser yokuphepha izithintelo, isenzi somgama, ukhuseleko lwekhamera ye-3D plane 360° + indawo yentloko, kunye nokhuseleko olunemilinganiselo emininzi.
●Ukusebenza kakuhle kakhulu
Ingcali ekunyukeni, ukunqumla imiqolomba, ukunqumla iilifti, ukuthwala kunye nokubeka izinto ndawonye.
Iimveliso eziNxulumeneyo



Ipharamitha yokucacisa
Ishishini Lethu


Iindidi zemveliso
-

Ingalo yeRobhothi yokuWelda ye-6 Axis yoShishino lweRobhothi ye-6 Axis
-

I-Agv50 50kg Umthamo woMthwalo oBambiseneyo Robot Ag ...
-

I-Desktop Small 4 Axis Scara Industrial Robot Arm ...
-

Isantya esiphezulu se-Automata Soldering Robotic Arm 6 Axi ...
-
Ingalo yeRobhothi yoShishino 6 Axis Robot Arm eneComp ...
-
Ukuwelda ngombane iHuazhongcnc okanye iHnc Hsr Small 6...