Ijenereyitha yeVacuum yePneumatic Two Finger Soft Gripper eSebenzayo yeRobot Automation



Ijenereyitha yeVacuum yePneumatic Two Finger Soft Gripper eSebenzayo yeRobot Automation
Udidi oluPhambili
Ingalo yerobhothi yemizi-mveliso / Ingalo yerobhothi esebenzisana nayo / Igripha yombane / I-actuator ekrelekrele / Izisombululo ze-automation
Isicelo

Iirobhothi ze-SCIC Z-EFG series grippers zincinci ngobukhulu kwaye zinenkqubo ye-servo eyakhelwe ngaphakathi, nto leyo eyenza kube nokwenzeka ukufikelela kulawulo oluchanekileyo lwesantya, indawo, kunye namandla okubamba. Inkqubo yokubamba ekhawulezileyo ye-SCIC yezisombululo zokuzenzekelayo iya kukuvumela ukuba uvule amathuba amatsha okwenza imisebenzi ngokuzenzekelayo ongazange ucinge ukuba inokwenzeka.
Uphawu
·Ukubetha okukhulu
· Amandla okubamba ahlengahlengiswayo kunye nokubetha okulungisekayo
·Ubomi obude: amashumi ezigidi zeemijikelo, zidlula iinzipho zomoya
· Isilawuli esakhelwe ngaphakathi: ubungakanani obuncinci, kulula ukuhlanganisa
·Ulawulo lweebhasi lwe-EIA485, I/O
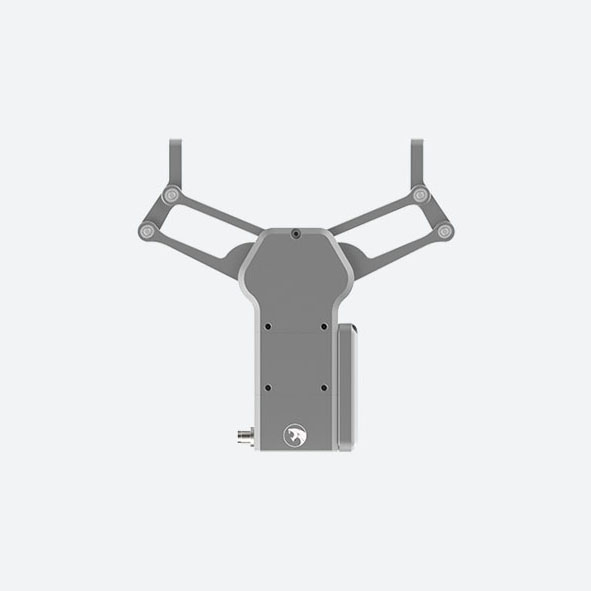
Amandla okuBamba: 40-130N, i-Y-Shape ye-Electric Gripper ene-stroke ye-120mm
Istroke Eside
Ukubetha okupheleleyo: 120mm
Imo yoLawulo
485 Modbus, EIA485, Ulawulo lweeBhasi
Amandla okuBamba
Amandla okuBamba 40-130N ahlengahlengiswayo
Umlawuli Ngaphakathi
Indawo encinci yokudibanisa, kulula ukuyidibanisa
Ulawulo lokuchaneka
Ukuphinda-phinda: ± 0.02mm
Ukubambelela okuthambileyo
Ingabamba izinto ezibuthathaka neziguquguqukayo

● Ukukhuthaza utshintsho olukhulu ekutshintshweni kweegrippers zomoya ngamagrippers ombane, igripper yokuqala yombane enenkqubo ye-servo edibeneyo eTshayina.
● Ukutshintshwa okugqibeleleyo kwe-air compressor + isihluzi + i-solenoid valve + i-throttle valve + i-pneumatic gripper
● Ubomi benkonzo yeebhayisekile ezininzi, ezihambelana nesilinda yendabuko yaseJapan
Iimveliso eziNxulumeneyo



Ipharamitha yokucacisa
| Inombolo yoMzekelo Z-EFG-130 | Iiparameters |
| Isimbuku isifo sohlangothi | 120mm |
| Amandla okubamba | 40-130N |
| Ukuphindaphinda | ± 0.02mm |
| Ubunzima obucetyiswayo bokubambelela | Ubuninzi. 1kg |
| Uthumelo imo | I-screw nut + unxibelelwano |
| Ukuzaliswa kwakhona kwegrisi yezinto ezihambayo | Rhoqo emva kweenyanga ezintandathu okanye isigidi seentshukumo/ixesha |
| Ixesha lokuhamba kwe-stroke yendlela enye | 0.9s |
| Uluhlu lobushushu bokusebenza | 5-55℃ |
| Uluhlu lokufuma olusebenzayo | RH35-80(IsiNgesi)Akukho qhwa) |
| Imo yentshukumo | Unxibelelwano |
| Ulawulo lwestroke | Iyalungiseka |
| Uhlengahlengiso lwamandla okubamba | Iyalungiseka |
| Ubunzima | 0.8kg |
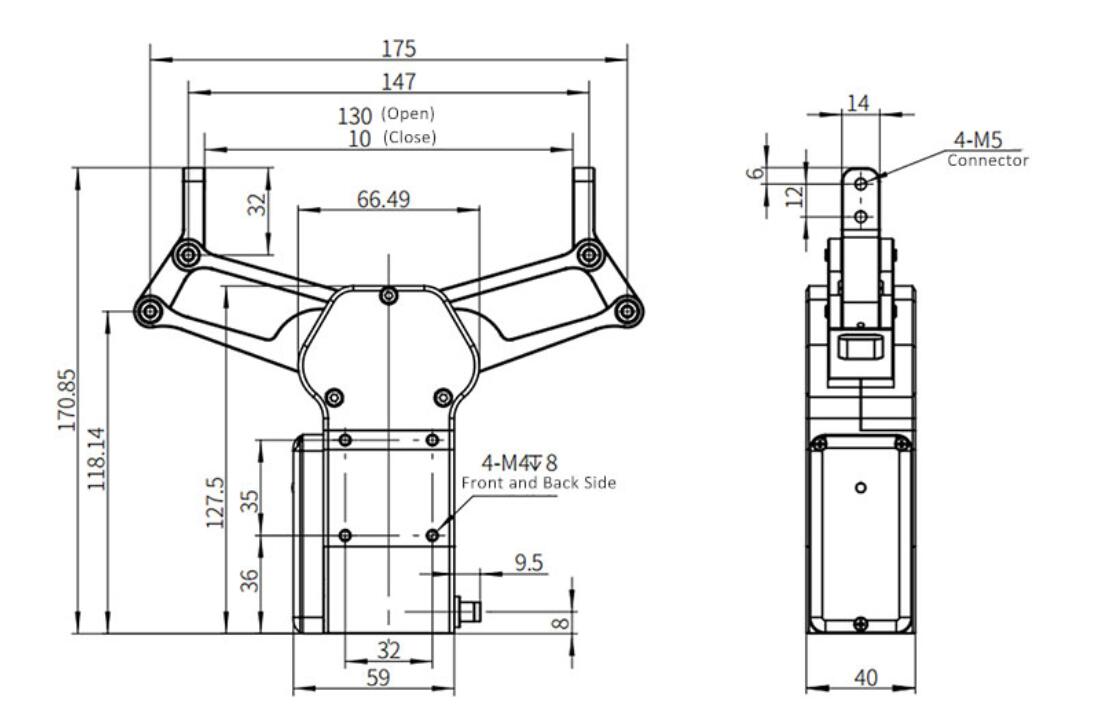
| Ubukhulu(IsiNgesi)L*W*H) | 171*187*40mm(ivuliwe)218*66.5*40m(ivaliwe) |
| Ukubekwa komlawuli | Yakhelwe ngaphakathi |
| Amandla | 10W |
| Uhlobo lwemoto | I-DC engenabhrashi |
| Umsinga oPhezulu | 2A |
| I-voltage elinganisiweyo | 24V |
| Umsinga omiyo | 0.4A |
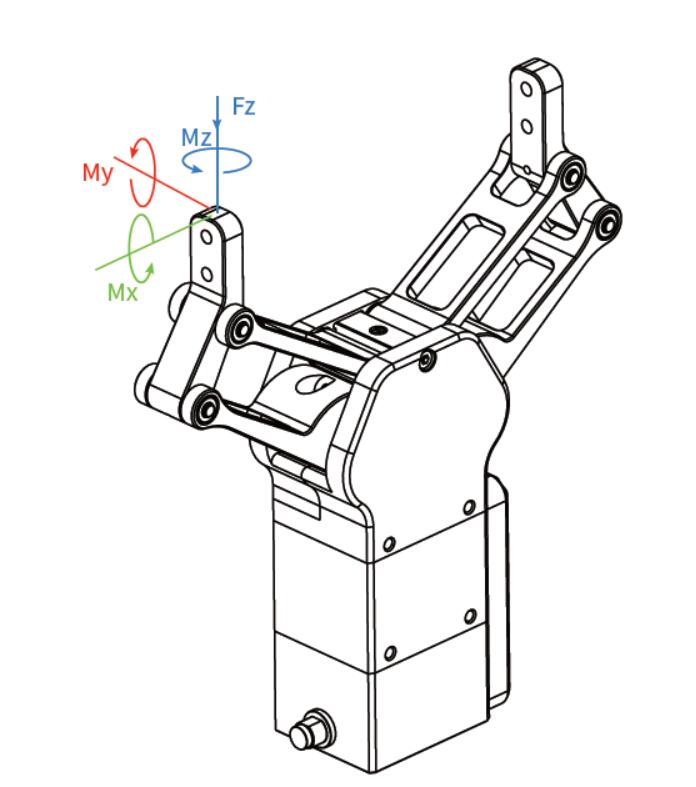
| Umthwalo ozinzileyo ovumelekileyo kwicala elithe nkqo | |
| Fz: | 200N |
| I-torque evumelekileyo | |
| Mx: | 2 Nm |
| Eyam: | 2 Nm |
| UMz: | 2 Nm |
Xhuma kwaye udlale, Kulula ukuDibanisa
I-gripper yombane ye-Z-EFG-130 ingahambelana nengalo yerobhothi esebenzisana nayo, kwaye inenkqubo ye-servo edibeneyo ngaphakathi, i-gripper enye kuphela enokulingana ne-compressor + filter + solenoid Valve + Throttle Valve + air gripper.


I-Long Stroke, Ukuhambelana Okuhle
Umgca osebenzayo wegripper yombane ungafikelela kwi-120mm, ubungakanani bayo bokuvala yi-10mm, igripper yombane ingasetyenziselwa iitshiphusi ze-semiconductor, i-3C electronic kunye nezinye izimboni zokuchaneka, njl.njl.
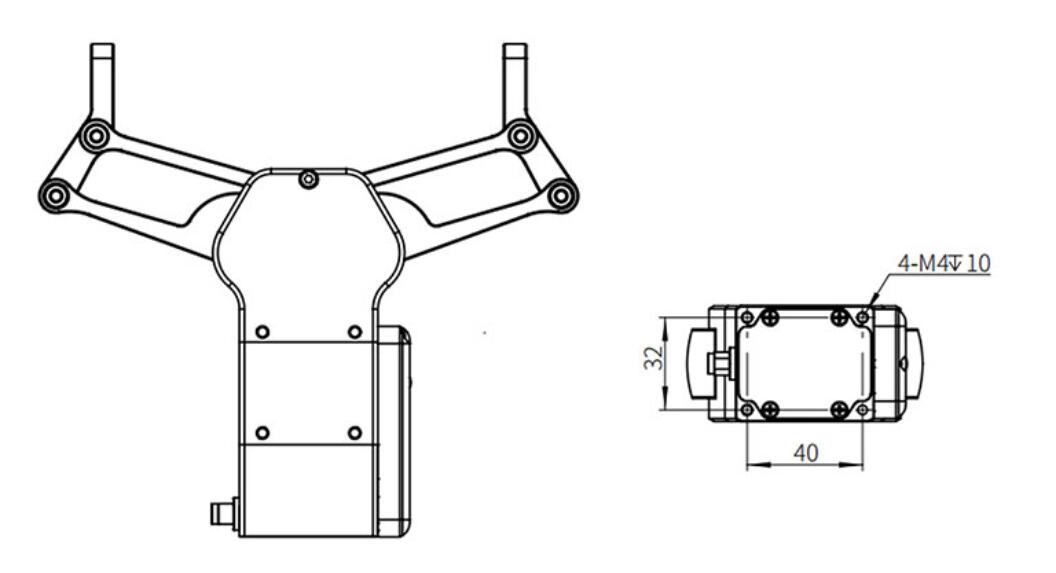
Ubungakanani obuncinci, Kulula ukubuhlanganisa

Ubungakanani bokuvula be-Z-EFG-130 yi-171*187*40mm, ubungakanani bokuvala yi-218*66.5*40mm, bubume obuncinci, buxhasa iintlobo zokufakela ezininzi, bulawula ngaphakathi, bunendawo encinci egqunyiweyo.

Ulawulo lwaMandla oluchanekileyo
Igripha yombane yenzelwe ukusebenzisa uyilo olukhethekileyo lokudlulisa kunye ne-algorithm yokuqhuba, amandla okubamba angama-40-130N anokuhlengahlengiswa, ubunzima bokubamba obucetyiswayo buyi-≤1kg, kwaye inokuphinda-phinda kwe-±0.02mm.
Ukubamba Okuguquguqukayo, Umsila Oguqukayo

I-gripper yombane ye-Z-EFG-130 ixhasa ukubambelela okuguqukayo, ifaneleka ngakumbi kwinto ejikelezayo, ejikelezayo okanye enomfanekiso okhethekileyo, iindawo zayo zomsila zinokutshintshwa ngokulula, abathengi banokubamba izinto ngokweemfuno zabo.


Iindlela zoLawulo oluPhinda-phinda, Kulula ukuzisebenzisa

Igripha yombane inokulawulwa ngokuchanekileyo yiModbus, uqwalaselo lwayo lulula, ukuze usebenzise iprotocol yonxibelelwano yeDigital I/O, kufuneka nje intambo enye ukuze uqhagamshele nge-ON/OFF, iyahambelana nenkqubo yolawulo ephambili ye-PLC.
Iziko Lomthwalo le-Gravity Offset
Ishishini Lethu


Iindidi zemveliso
-

Ixabiso loKhuphiswano leRobhothi yeShishini eyi-6 Axis Manip ...
-

Ukukhetha Iziqhamo Zamaqanda Ezikhawulezayo Kwishishini kunye Nokubeka Indawo 4 ...
-

I-Dobot Six Axis Collaborative Robot Arm Articula ...
-

Isixhobo sokulawula i-telescopic seRobotic Arm Army esinde esinama-20...
-
Intengiso Eshushu Irobhothi Ingalo Yesinyithi I-6-Axis Mechanical Robo ...
-

I-Industrial Machine Robot Arm 4 Axis Manipulator ...