I-Imako Daily Chemical, Food and Beverage Industry Robot One-Armed Cooperative yokupakisha kunye nokupakishwa kwePallet


I-Imako Daily Chemical, Food and Beverage Industry Robot One-Armed Cooperative yokupakisha kunye nokupakishwa kwePallet
Udidi oluPhambili
I-AGV AMR / i-jack up lifting AGV AMR / isithuthi esikhokelwa ngokuzenzekelayo se-AGV / irobhothi yeselula ezimeleyo ye-AMR / imoto ye-AGV AMR yokuphatha izinto zemizi-mveliso / Umenzi waseTshayina irobhothi ye-AGV / i-warehouse AMR / i-AMR jack up lifting laser SLAM navigation / irobhothi yeselula ye-AGV AMR / i-AGV AMR chassis laser SLAM navigation / irobhothi enobuchule yokuhambisa izinto
Ukwazisa i-robotic handling arm etshintsha umdlalo kwimizi-mveliso, efaka iibhegi kunye nebhokisi, isisombululo esitshintshayo esiya kutshintsha iinkqubo zokupakisha kunye nokuphatha zeli shishini. Le robotic arm yanamhlanje yenzelwe ukwandisa ukusebenza kakuhle kunye nemveliso ngelixa iqinisekisa ukuphathwa ngokukhuselekileyo kweengxowa, iibhokisi kunye neepakeji.
Njengoko isidingo sesantya nokuchaneka siqhubeka sikhula kwimveliso nakwizinto ezithuthwayo, izixhobo zethu zerobhothi eziphathwa nge-pallet, i-stacking, i-bag kunye ne-case packing zemizi-mveliso zisisombululo esiphezulu. Iintsuku zomsebenzi wezandla ziphelile kunye nomngcipheko wempazamo yomntu. Le ngalo yerobhothi iphucukileyo yenzelwe ukuba i-pallet, i-stacking kunye ne-handed zonke iintlobo zeengxowa, iibhokisi kunye neepakeji zibe lula, ibonelela ngemisebenzi engenamthungo kunye nexesha elincinci lokungasebenzi.
Ingalo yokuphatha irobhothi yokusetyenziswa kwimizi-mveliso, ukufaka iipalethi, ukupakisha, kunye nokupakisha iingxowa kunye neebhokisi, ineempawu ezingenakuthelekiswa nanto eziyenza yahluke kwiindlela zemveli. Ingalo yerobhothi ixhotyiswe ngee-sensors kunye netekhnoloji yanamhlanje ukuqinisekisa ukuhamba ngokuchanekileyo nangokungaguquguqukiyo, isusa amathuba okungasebenzi kakuhle okanye ukonakala kweemveliso eziphathwayo. Amandla ayo akhawulezayo, kunye nokukwazi ukubona ngokuchanekileyo kunye nokulungisa iimilo kunye nobukhulu obahlukeneyo, kwandisa kakhulu isantya kunye nokusebenza kakuhle kwemisebenzi yokupakisha.
Ukongeza, le ngalo yerobhothi inokuguquguquka okumangalisayo, nto leyo eyenza ukuba ifaneleke kwiindidi ezahlukeneyo zamashishini. Ukusuka ekulungisweni kokutya ukuya kumayeza, ukugcina impahla ukuya ekuvelisweni, esi sisombululo serobhothi sinokuziqhelanisa ngokulula neemeko ezahlukeneyo kunye nemisebenzi. Nokuba siphatha iingxowa ezinobunzima obahlukeneyo, sibeka iibhokisi ngokuchanekileyo, okanye sipakisha iimveliso ngononophelo, iingalo zethu zokuphatha irobhothi ezifakelwa kwiipalethi zoshishino, ezipakishwayo, kunye neebhokisi zezona sisombululo sigqibeleleyo.
Ngamafutshane, i-Industrial Palletizing Bag Box Packaging Robot Handling Arm itshintsha umdlalo kwihlabathi lokupakisha nokuphatha imboni. Ngeempawu zayo eziphambili, ukusebenza kakuhle okungenakuthelekiswa nanto kunye nokuguquguquka, esi sisombululo siguqukayo siya kuyila kwakhona imboni ngokunyusa kakhulu imveliso, ukunciphisa iindleko zabasebenzi kunye nokuqinisekisa ukhuseleko lwemveliso. Hlala uphambili kukhuphiswano kwaye wamkele ikamva le-automation yemizi-mveliso ngeengalo zethu zerobhothi ezisemgangathweni.
Isicelo

I-AMB Series Unmanned Chassis AMB (Auto Mobile Base) yesithuthi esizimeleyo se-agv, itshasi yendalo yonke eyenzelwe izithuthi ezikhokelwayo ze-agv, inika ezinye izinto ezinje ngokuhlela imephu kunye nokuhamba kwendawo. Le chasi ingenamanned yenqwelo ye-agv inika iindlela ezininzi zokunxibelelana ezifana ne-I/O kunye ne-CAN zokufaka iimodyuli ezahlukeneyo eziphezulu kunye nesoftware enamandla yabathengi kunye neenkqubo zokuhambisa ukunceda abasebenzisi bagqibezele ngokukhawuleza ukwenziwa kunye nokusetyenziswa kwezithuthi ezizimeleyo ze-agv. Kukho imingxunya emine yokufakela phezulu kwetshasi ingenamanned ye-AMB series yezithuthi ezikhokelwayo ze-agv, exhasa ukwandiswa okungacwangciswanga nge-jacking, ii-rollers, ii-manipulators, i-latent traction, i-display, njl.njl. ukufezekisa usetyenziso oluninzi lwetshasi enye. I-AMB kunye ne-SEER Enterprise Enhanced Digitalization zinokufezekisa ukuthunyelwa okudibeneyo kunye nokusasazwa kwamakhulu eemveliso ze-AMB ngaxeshanye, nto leyo ephucula kakhulu inqanaba lobuchule bezinto zangaphakathi kunye nothutho kumzi-mveliso.
Uphawu
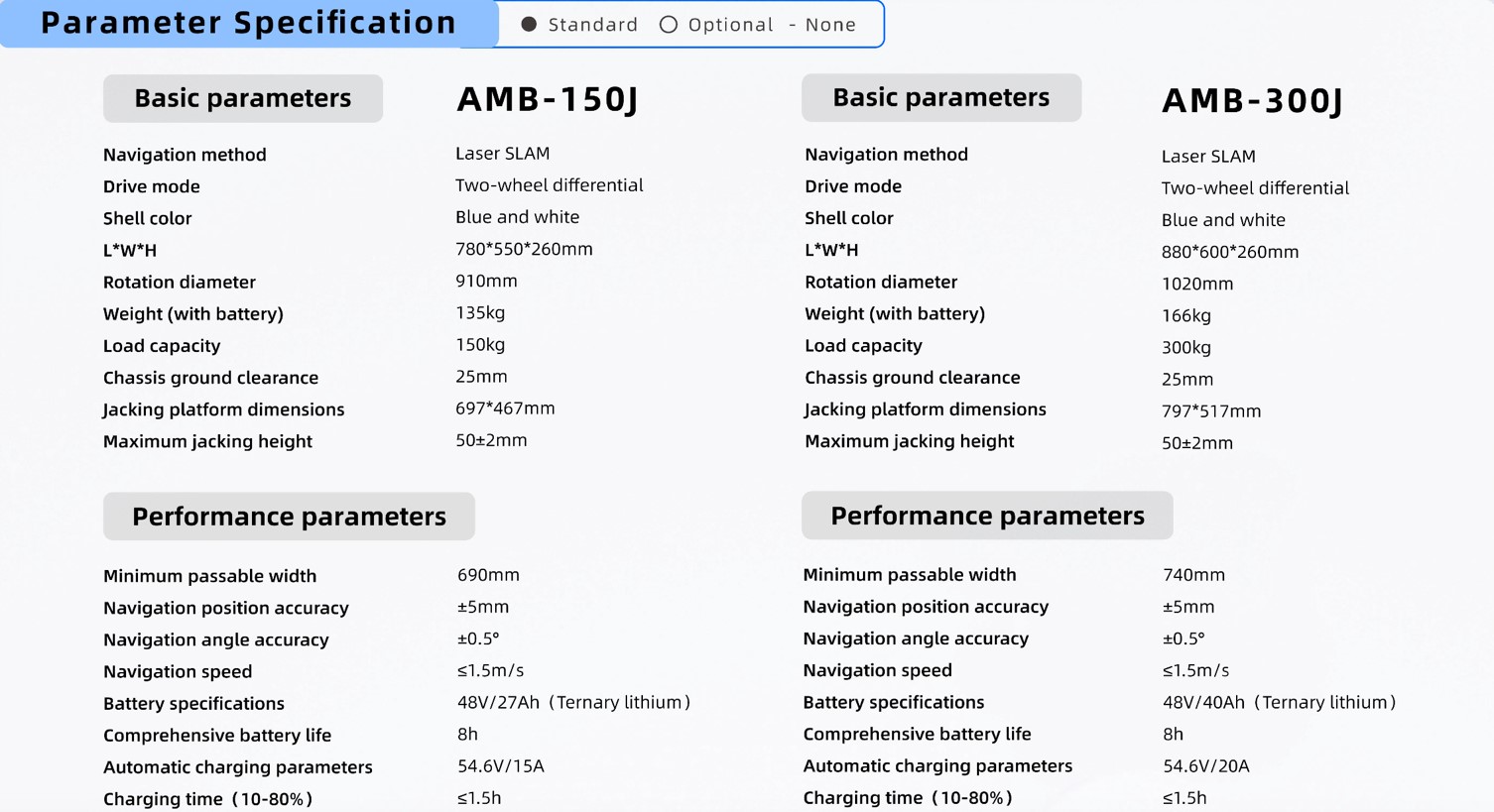
·umthwalo womthwalo: 150kg kunye ne-300kg
·Ukuphakama okuphezulu kwe-jacking: 50mm
·Ukuchaneka kwendawo yokukhangela: ± 5mm
·Ukuchaneka kwe-engile yokuhambahamba: ± 0.5°
● Iimpawu ezityebileyo ziyafumaneka nangaliphi na ixesha
Iimpawu ezisemgangathweni ezipheleleyo nezibalaseleyo kunye neempawu eziphucukileyo nezisebenzisekayo zinceda abathengi ukuba bafumane lula izinto ezikrelekrele.
● Amaqonga eenkcukacha ezininzi afumanekayo ukuze kwandiswe
Nika amaqonga anobunzima obuyi-150kg kunye no-300kg ukuhlangabezana neemfuno zomthwalo kunye nendawo yeshishini ezahlukeneyo. Ingasetyenziswa nee-manipulators, ii-rollers, i-jacking, i-latent traction, i-pan/tilt, isikrini sokubonisa, njl.njl. ukufezekisa usetyenziso oluninzi nge-chassis enye.
● ± 5 mm, isebenza kakuhle kwaye ichanekile
I-algorithm ye-Laser SLAM isetyenziselwa ukufezekisa indawo echanekileyo, kunye nokuchaneka kokufumana indawo okuphindaphindwayo okungabonisiyo kwelaser ngaphakathi kwe-±5 mm, okuvumela ukubekwa kwe-docking phakathi kweerobhothi ezihambayo nabantu, kunye nokuhamba kakuhle kwemithwalo phakathi kwamanqaku ahlukeneyo. Qaphela: Amaxabiso okwenyani axhomekeke kwiimeko zokusingqongileyo.
● Ukuhambahamba okuzinzileyo ukuze kubekho ukhuseleko nokuthembeka
Ukuzulazula nge-Laser SLAM, ukuzulazula nge-laser reflector, ukuzulazula ngekhowudi ye-QR kunye nezinye iindlela zokuzulazula zidityaniswe ngokugqibeleleyo kwaye zitshintshwa ngaphandle kokuphazamiseka ukuqinisekisa ukusebenza okuzinzileyo kwerobhothi ephathwayo.
● Ukusasazwa okulula kunye nolawulo olubonakalayo
Uluhlu olupheleleyo lwesoftware exhasayo kunye neenkqubo zedijithali zinokufezekisa ngokulula ukusebenza, ucwangciso kunye nolawulo lolwazi lweerobhothi eziphathwayo, kwaye ziqhagamshelane ngaphandle komthungo nenkqubo ye-MES yefektri ukuze zifezekise ngokwenene uthungelwano olukrelekrele.
Iimveliso eziNxulumeneyo



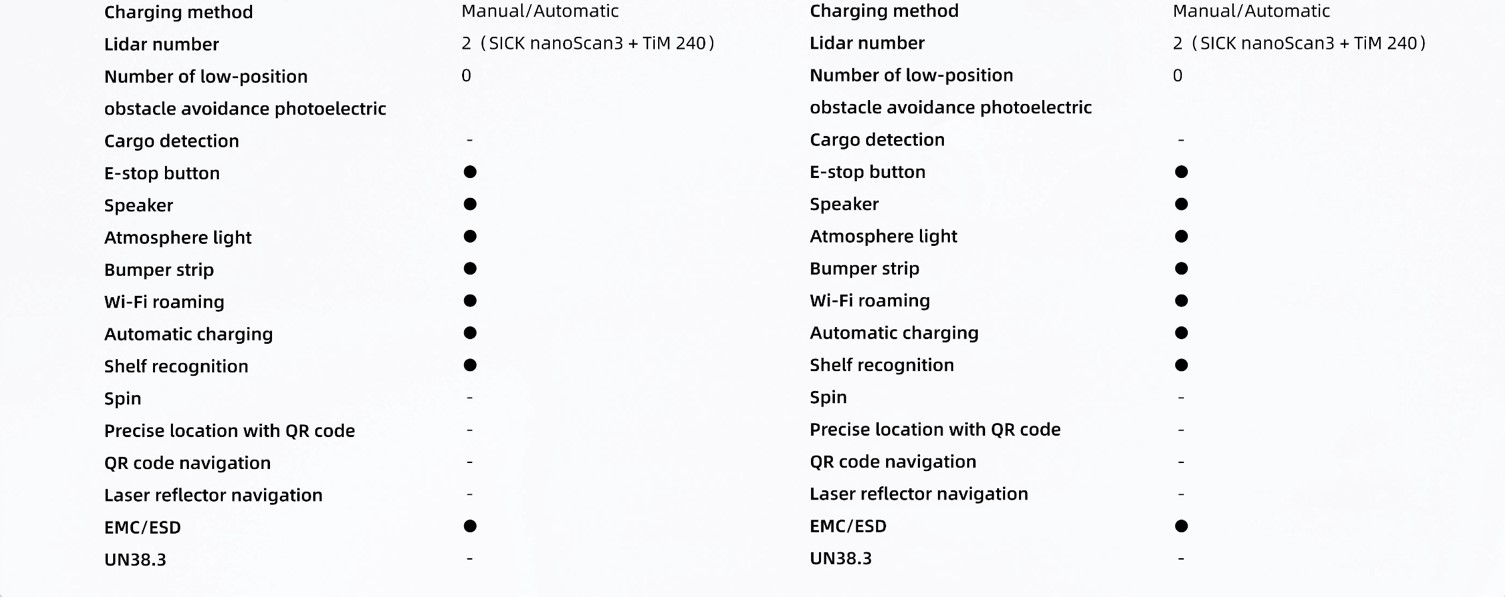
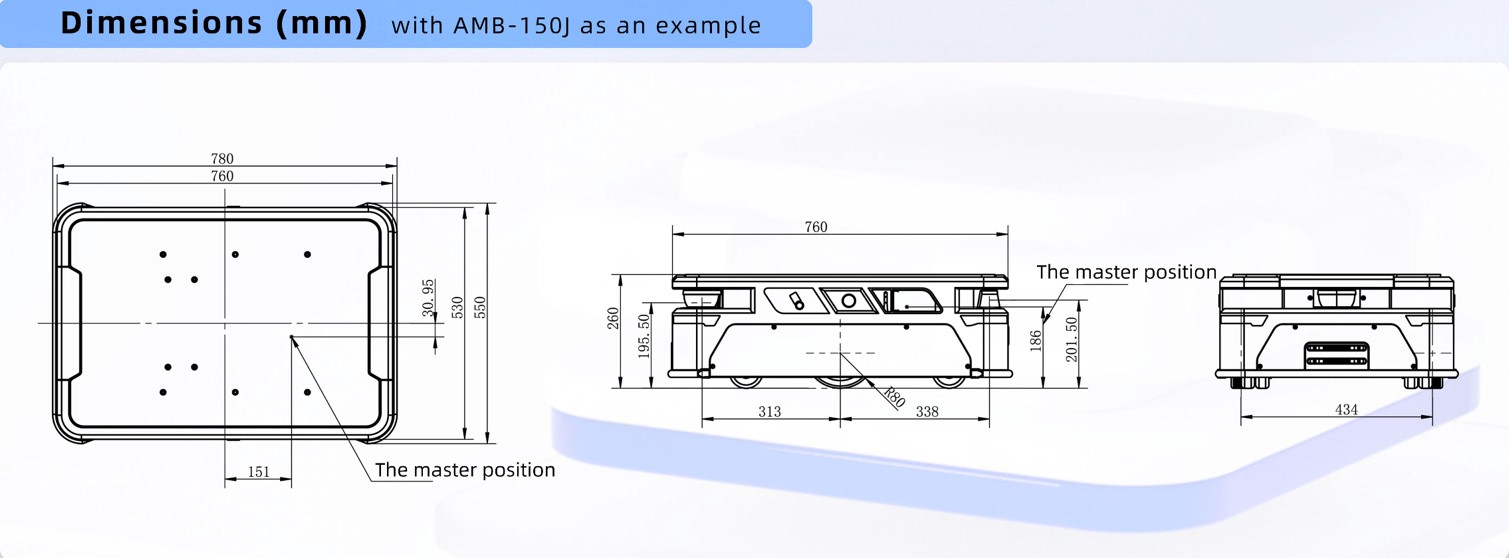
Ipharamitha yokucacisa
Ishishini Lethu


Iindidi zemveliso
-

I-Robo yeShishini ye-6 Axis ye-China ezenzekelayo ye-Industrial 6 Axis ...
-
Irobhothi yoShishino eSebenzayo ekrelekrele eyi-6 Ax...
-

Isixhobo sokuphatha i-Industrial Manipulator 2 Axis Servo Motor Arm R ...
-
I-China 6 Axis Manipulator Indus enexabiso eliphantsi yokuWelda...
-

Irobhothi eSebenzisanayo yeRobhothi eSebenzayo ye-Axis ezi-6...
-

I-6 Axis Payload 6kg Handling Cutting Welding Ind...