Ingalo yeRobhothi ye-Aixs eNcinci yoShishino
Ingalo yeRobhothi ye-Aixs eNcinci yoShishino
Udidi oluPhambili
Ingalo yerobhothi yemizi-mveliso / Ingalo yerobhothi esebenzisana nayo / Igripha yombane / I-actuator ekrelekrele / Izisombululo ze-automation
Isicelo
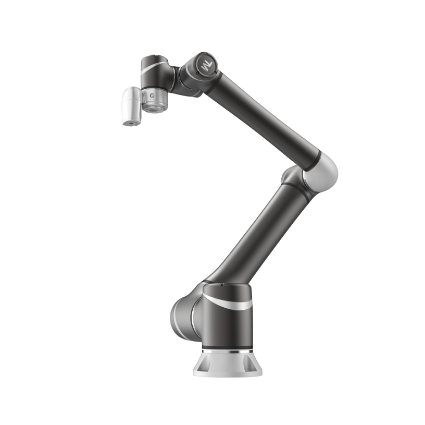
I-TM12 yeyona ifikelelekayo kakhulu kuthotho lwethu lweerobhothi, nto leyo evumela ukusebenza ngokubambisana, nokuba kwizicelo ezifuna ukuchaneka kwinqanaba lezoshishino kunye nokukwazi ukuphakamisa. Ineempawu ezininzi ezivumela ukuba isetyenziswe ngokukhuselekileyo kufutshane nabasebenzi babantu, kwaye ngaphandle kwesidingo sokufaka imiqobo emikhulu okanye ucingo. I-TM12 lukhetho oluhle kakhulu lwe-cobot automation ukuphucula ukuguquguquka, kunye nokwandisaimveliso.
Ngenkqubo yombono ehamba phambili kudidi, iteknoloji ye-AI ephucukileyo, ukhuseleko olupheleleyo, kunye nokusebenza okulula,I-AI Cobot iza kuyisa ishishini lakho phambili kunangaphambili.Thuthukisa ukwenziwa kwezinto ngokuzenzekelayo ngokunyusa imveliso, ukuphucula umgangatho, nokunciphisa iindleko.
Sizisa ubuchule bethu bamva nje kwicandelo le-automation yemizi-mveliso - i-Industrial Grinding and Polishing Robot Arm Mechanical 6-Axis Robot Arm. Yenzelwe ukuguqula imisebenzi yokugaya nokupolisha kuyo yonke imizi-mveliso, le ngalo yerobhothi iphucukileyo inika ukuchaneka okuphezulu, ukusebenza kakuhle kunye nokuguquguquka.
Ingalo yethu yerobhothi inee-axis ezintandathu zokuhamba, ilinganisa ukuguquguquka kunye nobuchule bengalo yomntu, nto leyo eyivumela ukuba yenze imisebenzi enzima yokusila nokupolisha ngokulula. Eli nqanaba lokukwazi ukuhamba liqinisekisa ukuba yonke indawo iphathwa ngokulinganayo, nto leyo ephumela ekugqityweni nasekulungeni okugqibeleleyo.
Enye yezona zinto zibalulekileyo kwiingalo zethu zerobhothi zokugaya nokupolisha zoshishino ngamandla azo abalaseleyo oomatshini. Yenzelwe ukumelana nokusetyenziswa kakhulu kwezoshishino, le ngalo yerobhothi inokusingatha imithwalo enzima kwaye imelane neemeko zokusebenza ezinzima. Ulwakhiwo lwayo oluqinileyo luqinisekisa uzinzo ngexesha lokusebenza, lunciphisa ukungcangcazela okunokuchaphazela ukuchaneka komsebenzi.
Ayipheleli nje ekubeni le ngalo yerobhothi inamandla, isantya sayo kunye nokuchaneka kwayo kuyamangalisa. Ixhotyiswe nge-algorithms zokulawula intshukumo eziphambili, inokufezekisa ukusebenza ngesantya esiphezulu ngaphandle kokuchaphazela ukuchaneka. Oku kwenza imisebenzi yokusila nokupolisha igqitywe ngokukhawuleza, nto leyo eyandisa kakhulu imveliso kwinkqubo yokuvelisa.
Ukuze kuphuculwe ukuguquguquka kwayo kunye nokuguquguquka kwayo, iingalo zethu zerobhothi zinokucwangciswa kwaye zilungiswe ngokulula ukuze zenze iindlela ezahlukeneyo zokusila nokupolisha. Nokuba kukugaya imiphetho ebukhali, ukupolisha iindawo ezithambileyo, okanye ukupolisha iipateni ezintsonkothileyo, le ngalo yerobhothi inokwenza konke.
Iingalo zethu zerobhothi ezisikwayo nezicoliweyo zoshishino zikwabonelela ngokudibanisa okungenamthungo nezinye iinkqubo kunye noomatshini abasebenza ngokuzenzekelayo. Oku kwenza ukuba ukusebenza kube lula, kususe imiqobo kwaye kuphucula imveliso iyonke.
Ukongeza, amaxabiso ethu akhuphisanayo aqinisekisa ukuba amashishini abo bonke ubungakanani anokuxhamla kolu buchwepheshe butsha ngaphandle kokuchitha imali eninzi. Sikholelwa ukuba ukuzenzekela kufuneka kufikeleleke kuye wonke umntu, kwaye iimveliso zethu zimele olu kuzinikela ekufikelelekeni.
Ngamafutshane, i-Industrial Grinding and Polishing Robot Arm Mechanical 6-Axis Robot Arm itshintsha umdlalo kwicandelo le-industrial automation. Ngamandla ayo aphezulu oomatshini, isantya, ukuchaneka, ukuguquguquka kunye nexabiso elikhuphisanayo, le robot ingalo iya kutshintsha imisebenzi yokugaya nokupolisha kuyo yonke imboni. Yamkela ikamva le-industrial automation kwaye ufumane amava amatsha okuvelisa kunye nokuhambelana neemveliso zethu eziphambili.
Iimbonakalo
NGOBUCHULE
I-Cobot yakho ene-AI ikhuselekile kwixesha elizayo
• Ukuhlolwa kwe-optical okuzenzakalelayo (AOI)
• Ukuqinisekiswa komgangatho kunye nokungaguquguquki
• Ukwandisa ukusebenza kakuhle kwemveliso
• Ukunciphisa iindleko zokusebenza
KULULA
Akukho mava afunekayo
• Ujongano lwemizobo ukuze kube lula ukwenza iinkqubo
• Umsebenzi wokuhlela ojolise kwinkqubo
• Isikhokelo esilula sokufundisa izikhundla
• Ukulinganisa okubonakalayo ngokukhawuleza ngebhodi yokulinganisa
IKHUSELEKILE
Ukhuseleko oludibeneyo lubaluleke kakhulu kuthi
• Iyahambelana ne-ISO 10218-1:2011 kunye ne-ISO/TS 15066:2016
• Ukufunyanwa kwe-collison kunye nokuma okungxamisekileyo
• Gcina iindleko kunye nendawo yemiqobo kunye nocingo
• Misela imida yesantya kwindawo yokusebenza esebenzisanayo
Ii-cobot ezisebenzisa i-AI ziyaqaphela ubukho kunye nolwalathiso lwendawo ezikuyo kunye namacandelo azo ukuze zenze uhlolo olubonakalayo kunye nemisebenzi yokukhetha nokubeka izinto ngendlela eguquguqukayo. Sebenzisa i-AI ngokulula kumgca wemveliso kwaye wonyuse imveliso, unciphise iindleko, kwaye unciphise amaxesha omjikelo. Umbono we-AI unokufunda iziphumo ezivela koomatshini okanye kwizixhobo zokuvavanya kwaye wenze izigqibo ezifanelekileyo ngokufanelekileyo.
Ngaphandle kokuphucula iinkqubo zokwenza izinto ngokuzenzekelayo, i-cobot eqhutywa yi-AI inokulandelela, ihlalutye, kwaye idibanise idatha ngexesha lemveliso ukuthintela iziphene kunye nokuphucula umgangatho wemveliso. Khulisa ngokulula ukuzenzekela kwefektri yakho ngeseti epheleleyo yetekhnoloji ye-AI.
Iirobhothi zethu ezisebenzisanayo zixhotyiswe ngenkqubo yokubona edibeneyo, enika ii-cobot amandla okubona indawo ezikuyo nto leyo ephucula kakhulu amandla e-cobot. Umbono werobhothi okanye ukukwazi "ukubona" nokutolika idatha ebonakalayo ibe yimiyalelo yemiyalelo yenye yeempawu ezisenza sibe ngcono. Itshintsha umdlalo wokwenza imisebenzi ngokuchanekileyo kwiindawo zokusebenza ezitshintshayo, yenza imisebenzi isebenze kakuhle, kwaye iinkqubo zokwenza izinto ngokuzenzekelayo zisebenze kakuhle.
Yenzelwe abasebenzisi bokuqala engqondweni, ulwazi lwenkqubo aluyomfuneko ukuze uqalise nge-AI Cobot. Intshukumo yokucofa nokutsala enobuchule kusetyenziswa isoftware yethu yenkqubo yokuhamba inciphisa ubunzima. Itekhnoloji yethu enelungelo lobunikazi ivumela abaqhubi abangenamava okubhala ikhowudi ukuba bacwangcise iprojekthi emfutshane njengemizuzu emihlanu.
Izinzwa zokhuseleko ezisisiseko ziya kuyimisa i-AI Cobot xa kufunyenwe ukudibana komzimba, nto leyo enciphisa umonakalo onokubakho kwindawo engenaxinzelelo nekhuselekileyo. Ungamisela nemida yesantya serobhothi ukuze isetyenziswe kwiindawo ezahlukeneyo kufutshane nabasebenzi bakho.
Iimveliso eziNxulumeneyo



Ipharamitha yokucacisa
| Imodeli | TM12 | |
| Ubunzima | 32.8KG | |
| Umthwalo ophezulu | 12KG | |
| Fikelela | 1300mm | |
| Uluhlu oludibeneyo | J1,J6 | ±270° |
| J2,J4,J5 | ±180° | |
| J3 | ±166° | |
| Isantya | J1,J2 | 120°/s |
| J3 | 180°/s | |
| J4 | 180°/s | |
| J5 | 180°/s | |
| J6 | 180°/s | |
| Isantya Esiqhelekileyo | 1.3m/s | |
| Isantya esiphezulu | 4m/s | |
| Ukuphindaphinda | ± 0.1mm | |
| Umgangatho wenkululeko | Iijoyinti ezi-6 zokujikeleza | |
| I/O | Ibhokisi yokulawula | Igalelo ledijithali: 16 Imveliso yedijithali: 16 Igalelo le-analog:2 Isiphumo se-analog: 1 |
| Ikhonkco lesixhobo. | Igalelo ledijithali: 4 Imveliso yedijithali: 4 Igalelo le-analog:1 Isiphumo se-analog:0 | |
| Ubonelelo loMbane lwe-I/O | I-24V 2.0A yebhokisi yokulawula kunye ne-24V 1.5A yesixhobo | |
| Udidi lwe-IP | IP54 (Ingalo yeRobhothi); IP32 (Ibhokisi yoLawulo) | |
| Ukutya umbane | I-watts ezingama-300 eziqhelekileyo | |
| Ubushushu | Irobhothi ingasebenza kubushushu obuphakathi kwe-0-50℃ | |
| Ucoceko | Iklasi yesi-3 ye-ISO | |
| Ukunikezwa Amandla | I-100-240 VAC, 50-60 Hz | |
| Ujongano lwe-I/O | 3xCOM, 1xHDMI, 3xLAN, 4xUSB2.0, 2xUSB3.0 | |
| Unxibelelwano | I-RS232, i-Ethemet, i-Modbus TCP/RTU (inkosi kunye nekhoboka), i-PROFINET (ukhetho), i-EtherNet/IP (ukhetho) | |
| Indawo yoCwangciso | I-TMflow, isekelwe kwitshati yokuhamba | |
| Isiqinisekiso | I-CE, i-SEMI S2 (Ukhetho) | |
| I-AI kunye nombono*(1) | ||
| Umsebenzi we-AI | Uhlulo, Ukufunyanwa kwezinto, Ukwahlulahlula, Ukufunyanwa kwezinto ezingaqhelekanga, i-AI OCR | |
| Isicelo | Indawo, Ukufundwa kweBhakhowudi ye-1D/2D, i-OCR, Ukufunyanwa kweziphene, Ukulinganisa, Ukujonga iNdibano | |
| Ukuchaneka kokubeka indawo | Indawo ye-2D: 0.1mm*(2) | |
| Iliso lisesandleni (Elakhelwe ngaphakathi) | I-carmera yombala egxile ngokuzenzekelayo enesisombululo se-5M, Umgama wokusebenza yi-100mm ~ ∞ | |
| Iliso ukuya kwisandla (Uyazikhethela) | Xhasa iikhamera eziphezulu ze-2xGigE 2D okanye i-1xGigE 2D Camera +1x3D Camera*(3) | |
| *(1)Akukho zixhobo zerobhothi ezibonakalayo ezakhelwe ngaphakathi ezifana ne-TM12X, TM14X, TM16X, TM20X nazo ziyafumaneka. *(2)Idatha ekule theyibhile ilinganiswa yilabhoratri yeTM kwaye umgama wokusebenza yi-100mm. Kufuneka kuqatshelwe ukuba kwizicelo ezisebenzayo, amaxabiso afanelekileyo anokwahluka ngenxa yezinto ezifana nomthombo wokukhanya okwindawo, iimpawu zezinto, kunye neendlela zokucwangcisa umbono eziya kuchaphazela utshintsho ekuchanekeni. *(3)Jonga iwebhusayithi esemthethweni yeTM Plug & Play ukuze ufumane iimodeli zekhamera ezihambelana neTM Robot. | ||
Ishishini Lethu


Iindidi zemveliso
-

Irobhothi ye-4 Axis Scara ene-Suction Gripper yePic...
-
I-6 Axis Short Arm Handling Robot Industria ...
-

I-Tefude engabizi kakhulu yeRobotic Arm Spider R eyenziwe ngokwezifiso ...
-
I-Industrial Machine Robot Arm 4 Axis Manipulator ...
-

Irobhothi eSebenzisanayo (Erc 612m/Erc 612) I-Six Degr...
-
Ukuwelda ngombane iHuazhongcnc okanye iHnc Hsr Small 6...