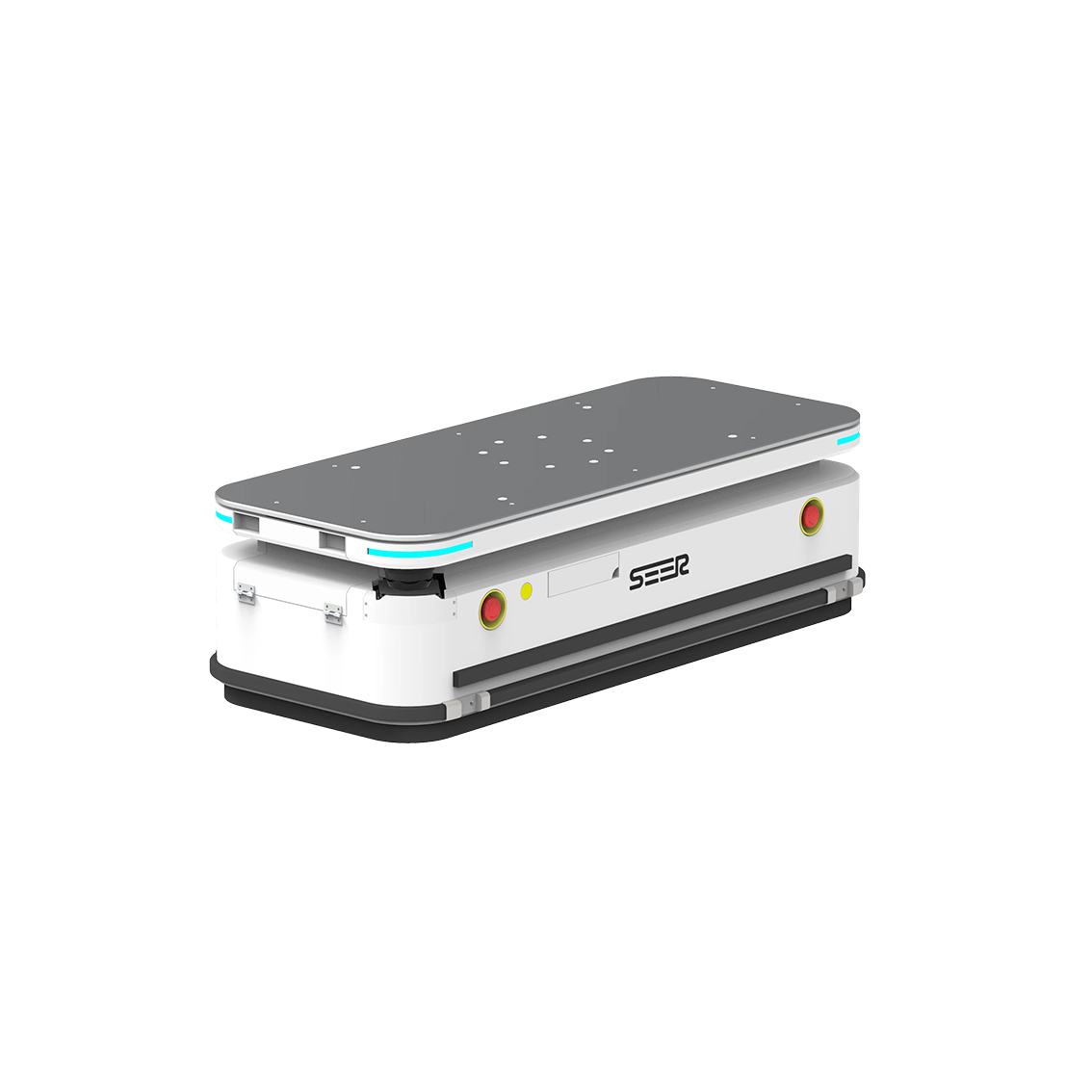
IIROBOTHI ZOKUJACKING – Irobhothi yokuphakamisa enika i-Omni-Directional SJV-W600DS-DL
Udidi oluPhambili
I-AGV AMR / i-jack up lifting AGV AMR / isithuthi esikhokelwa ngokuzenzekelayo se-AGV / irobhothi yeselula ezimeleyo ye-AMR / imoto ye-AGV AMR yokuphatha izinto zemizi-mveliso / Umenzi waseTshayina irobhothi ye-AGV / i-warehouse AMR / i-AMR jack up lifting laser SLAM navigation / irobhothi yeselula ye-AGV AMR / i-AGV AMR chassis laser SLAM navigation / irobhothi enobuchule yokuhambisa izinto
Isicelo

I-AMB Series Unmanned Chassis AMB (Auto Mobile Base) yesithuthi esizimeleyo se-agv, itshasi yendalo yonke eyenzelwe izithuthi ezikhokelwayo ze-agv, inika ezinye izinto ezinje ngokuhlela imephu kunye nokuhamba kwendawo. Le chasi ingenamanned yenqwelo ye-agv inika iindlela ezininzi zokunxibelelana ezifana ne-I/O kunye ne-CAN zokufaka iimodyuli ezahlukeneyo eziphezulu kunye nesoftware enamandla yabathengi kunye neenkqubo zokuhambisa ukunceda abasebenzisi bagqibezele ngokukhawuleza ukwenziwa kunye nokusetyenziswa kwezithuthi ezizimeleyo ze-agv. Kukho imingxunya emine yokufakela phezulu kwetshasi ingenamanned ye-AMB series yezithuthi ezikhokelwayo ze-agv, exhasa ukwandiswa okungacwangciswanga nge-jacking, ii-rollers, ii-manipulators, i-latent traction, i-display, njl.njl. ukufezekisa usetyenziso oluninzi lwetshasi enye. I-AMB kunye ne-SEER Enterprise Enhanced Digitalization zinokufezekisa ukuthunyelwa okudibeneyo kunye nokusasazwa kwamakhulu eemveliso ze-AMB ngaxeshanye, nto leyo ephucula kakhulu inqanaba lobuchule bezinto zangaphakathi kunye nothutho kumzi-mveliso.
Uphawu
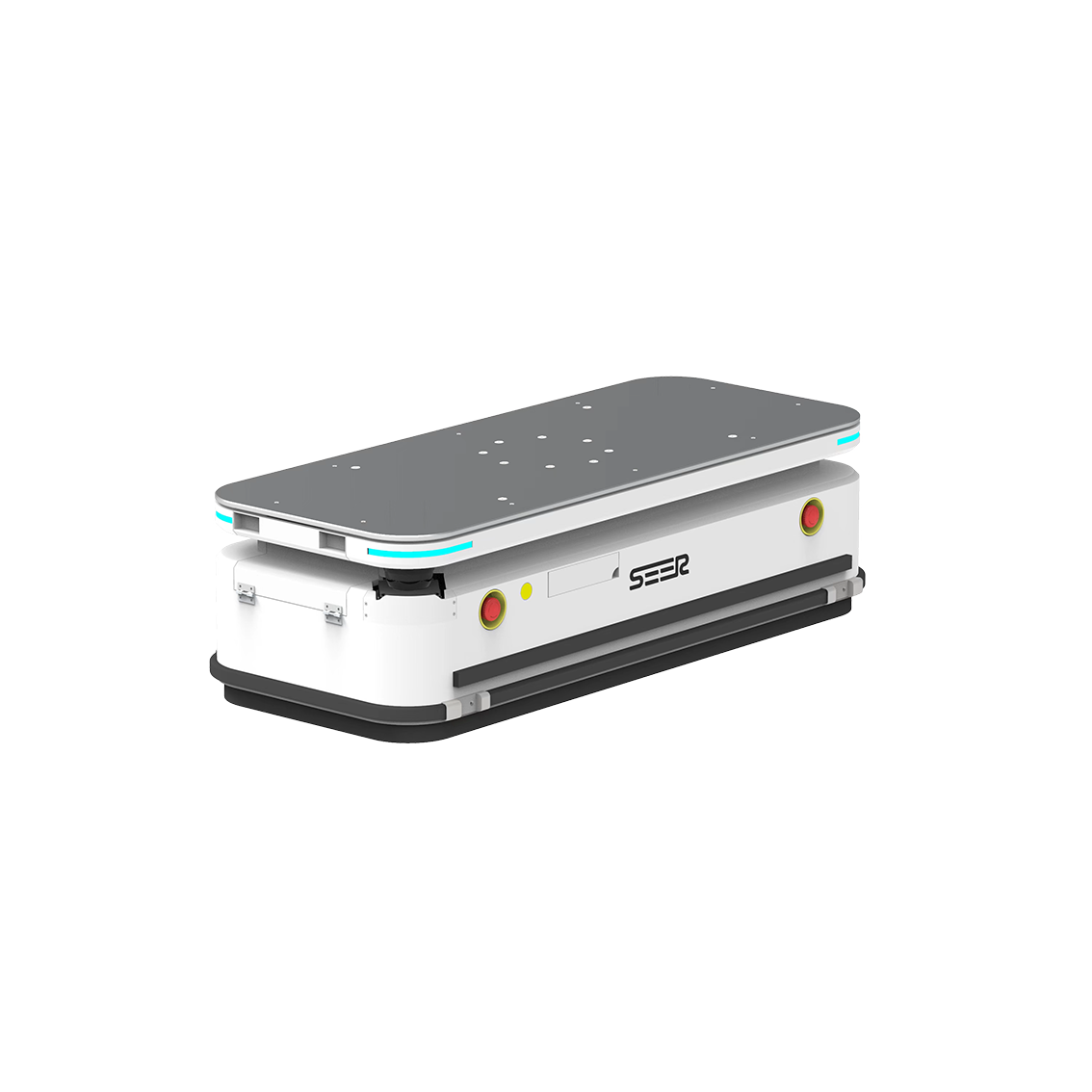
· Umthwalo olinganisiweyo: 600kg
· Ixesha Lokusebenza: 6.5h
· Inombolo yeLidar: 2
· Ububanzi bokujikeleza: 1322mm
· Isantya sokuHamba: ≤1.2m/s
· Ukuchaneka kokubeka: ±5,±0.5mm
● Iindlela ezininzi zokuKhangela ziyafumaneka
Ukuhamba nge-Laser SLAM kunye ne-QR code kunokutshintshwa ngokukhululekileyo nangokulula, ukuhlangabezana neemfuno zeemeko ezahlukeneyo kunye nokuchaneka okwahlukileyo.
● Intshukumo Eguquguqukayo Engakumbi Eya kwicala Elipheleleyo
Imodeli yentshukumo ejolise ngqo kwi-omni-directional ivumela ukuhamba okungenamida kunye nokuncitshiswa kwemida kwiimeko.
● Ukhuseleko
Ukhuseleko olupheleleyo nge-LIDAR + Umda okhuselekileyo.
● Ukusebenza kakuhle noBukrelekrele
Iinkqubo zeshedyuli kunye neendawo zokugcina izinto zinokufikelelwa ngokulula ukuze kulawulwe kakuhle ishishini kwaye kuphuculwe.
Uyilo olubhityileyo oluyi-546 mm kwiindlela ezahlukeneyo ezimxinwa.
● Umthamo ophezulu woMthwalo kunye nobomi bebhetri obude
Umthamo womthwalo osebenza kakuhle uxhasa umthwalo we-600 kg, kunye nobomi bebhetri beeyure eziyi-6.5.
Iimveliso eziNxulumeneyo



Ipharamitha yokucacisa
| Igama lemveliso | I-SJV-SW500 | I-SJV-W600DS-DL | I-SJV-W1000 | I-SJV-W1500 | |
| Isisekoiiparameter | Indlela yokukhangela | I-Laser SLAM | I-Laser SLAM | I-Laser SLAM | I-Laser SLAM |
| Imo yokuqhuba | Umahluko wamavili amabini | Ivili lokuqhuba eliphindwe kabini elibhekisa kwicala ngalinye | Umahluko wamavili amabini | Umahluko wamavili amabini | |
| Umbala weqokobhe | Umbala oluhlaza okwesibhakabhaka/ olungiselelwe wena | RAL9003 / Umbala owenziwe ngokwezifiso | Umbala oluhlaza okwesibhakabhaka / owenziwe ngokwezifiso | Umbala oluhlaza okwesibhakabhaka / owenziwe ngokwezifiso | |
| L*W*H(mm) | 924*758*300 | 1276*546*365 | 1224*730*420 | 1210*892*280 | |
| Ububanzi bokujikeleza (mm) | 1035 | 1330 | 1350 | 1415 | |
| Ubunzima (ngebhetri) (kg) | 200 | 320 | 250 | 250 | |
| Umthwalo womthwalo (kg) | 500 | 600 | 1000 | 1500 | |
| Ubukhulu beqonga lokujaja (mm) | Ø600 | 1250*510 | 1200*700 | 1180*860 | |
| Ukuphakama okuphezulu kwe-jacking (mm) | 60±1 | 60±1 | 60±1 | 60±1 | |
| Ukusebenza iiparameter | Ububanzi obuncinci obunokugqithwa(mm) | 898 | 660 | 870 | 1000 |
| Ukuchaneka kwendawo yokuhamba (mm) * | ±5 | ±5 | ±5 | ±5 | |
| Ukuchaneka kwe-engile yokuhamba (°) * | ± 0.5 | ± 0.5 | ± 0.5 | ±1 | |
| Isantya sokuhamba (m/s) | ≤1.67 | ≤1.2 | ≤1.67 | ≤1.67 | |
| Ibhetriiiparameter | Iinkcukacha zebhetri (V/Ah) | 48/40 (iLithium Iron Phosphate) | 48/40 (iLithium Iron Phosphate) | 48/40 (iLithium Iron Phosphate) | 48/40 (iLithium Iron Phosphate) |
| Ubomi bebhetri obupheleleyo (h) | 10 | 8 | 6 | 6 | |
| Iiparamitha zokutshaja ngokuzenzekelayo(V/A) | 54.6/25 | 54.6/25 | 54.6/25 | 54.6/25 | |
| Ixesha lokutshaja (10-80%) (h) | ≤1.5 | ≤1.5 | ≤1.5 | ≤2 | |
| Indlela yokutshaja | Ngesandla/Ngokuzenzekelayo | Ngesandla/Ngokuzenzekelayo/Ukutshintsha | Ngesandla/Ngokuzenzekelayo | Ngesandla/Ngokuzenzekelayo | |
| Izimiselo | Inombolo yeLidar | 1(SICK nanoScan3/P+F R2000-HD) | 2 (SICK nanoScan3) | 2(SICK nanoScan3 / P+FR2000-HD + OLEILR-1BS2) | 1(SICK nanoScan3 / P+F R2000-HD) |
| Inani lezinto ezithintelayo ezikwindawo ephantsi kunye nombane osebenzisa i-photoelectric | - | - | - | - | |
| Ukufunyanwa kwemithwalo | - | - | - | - | |
| Iqhosha le-E-stop | ● | ● | ● | ● | |
| Isithethi | ● | ● | ● | ● | |
| Ukukhanya komoya | ● | ● | ● | ● | |
| I-Bumperstrip | ● | ● | ● | ● | |
| Imisebenzi | Ukuzulazula kwe-Wi-Fi | ● | ● | ● | ● |
| Ukutshaja ngokuzenzekelayo | ● | ● | ● | ● | |
| Ukuqatshelwa kweshelufu | ● | ● | ● | ● | |
| Jikelezisa | ● | - | - | ● | |
| Indawo echanekileyo enekhowudi ye-QR | 〇 | 〇 | 〇 | 〇 | |
| Ukuhambahamba kwekhowudi ye-QR | 〇 | 〇 | 〇 | 〇 | |
| Ukuhambahamba kwe-laser reflector | 〇 | 〇 | 〇 | 〇 | |
| Iziqinisekiso | I-EMC/ESD | ● | ● | ● | - |
| I-UN38.3 | ● | ● | ● | 〇 | |
* Ukuchaneka kokuhamba ngeenyawo kudla ngokubhekisa ekuchanekeni kokuphindaphinda okwenziwa yirobhothi ukuya kwisikhululo.
● Eqhelekileyo 〇 Ukhetho Akukho nanye
Ishishini Lethu


Iindidi zemveliso
-

I-SMART FORKLIFT – I-SFL-CBD15 Laser SLAM Sma...
-

I-JACKING ROBOTS - I-Satety Robot i-AMB-1000JS
-

UMGANGATHO I-AMRS – iZiseko zeMobile ezizenzekelayo AMB-300...
-

UMGANGATHO I-AMRS – Iziseko zeMobile ezizenzekelayo i-AMB-300XS
-

IIROBOTHI ZOKUJIKA – Irobhothi yokuphakamisa i-Laser SLAM...
-

IIROBOTHI ZOKUJACKING - Irobhothi yokuphakamisa iRotary AMB ...