I-Robotic Gripper Electric 2 Fingers Parallel kunye ne-6 Axis Industrial kunye ne-Collaborative Robot yePick and Place
I-Robotic Gripper Electric 2 Fingers Parallel kunye ne-6 Axis Industrial kunye ne-Collaborative Robot yePick and Place
Udidi oluPhambili
Ingalo yerobhothi yemizi-mveliso / Ingalo yerobhothi esebenzisana nayo / Igripha yombane / I-actuator ekrelekrele / Izisombululo ze-automation
Siyavuya ukubonisa ubuchule bethu bamva nje kwi-robotics yemizi-mveliso - ingalo yerobhothi yemizi-mveliso ezenzekelayo. Lo matshini onamandla noguquguqukayo wenzelwe ukuguqula amashishini kuquka ukuphatha, ukupakisha, ukukha kunye nokuwelda. Ngenxa yezakhono zawo eziphambili kunye nokusebenza okuphezulu, iingalo zerobhothi yemizi-mveliso ezenzekelayo ziya kuchaza ngokutsha ikamva le-automation.
Ngenxa yesidingo sokusebenza kakuhle kunye nemveliso esandayo, amashishini ahlala efuna izisombululo zokuphucula imisebenzi. Kulapho ke iingalo zerobhothi zoshishino ezizenzekelayo zingena khona. Ngokuhamba kwayo ngokuchanekileyo kunye nokusebenza kwayo ngesantya esiphezulu, inokusingatha ngokulula iintlobo ngeentlobo zezinto kunye neemveliso, iqinisekisa inkqubo yemveliso engenamthungo.
Enye yezona zinto zibalaseleyo kwiingalo zethu zerobhothi zoshishino ezizenzekelayo kukukwazi kwazo ukuphatha nokupakisha iimveliso ngokufanelekileyo. Ngesoftware yayo ekrelekrele kunye netekhnoloji yokubamba esemgangathweni, iphatha izinto ezibuthathaka ngobuchule, iqinisekisa ukupakishwa okukhuselekileyo nokuchanekileyo. Oku kususa umngcipheko wokonakala ngexesha lokuphathwa nokupakishwa, ekugqibeleni kusindisa amashishini ixesha elixabisekileyo kunye nemali.
Ukongeza, iingalo zerobhothi zoshishino ezizenzekelayo zixhotyiswe ngezakhono eziphambili zokukhetha. Inokukhetha ngokukhawuleza nangokuchanekileyo iimveliso kwiibhanti ezahlukeneyo zokuhambisa okanye iiyunithi zokugcina. Oku kususa isidingo somsebenzi wezandla kwaye kunciphisa kakhulu amathuba eempazamo okanye iingozi. Ngenkqubo yayo yokubona echanekileyo kunye nezixhobo zokubamba ezisebenzisekayo, ingalo yerobhothi inokusingatha iimilo ezahlukeneyo kunye nobukhulu, nto leyo eyenza ifaneleke kumashishini amaninzi.
Ukongeza, iingalo zethu zerobhothi zoshishino ezizenzekelayo ziyakwazi ukwenza imisebenzi yokuwelda echanekileyo. Ingadityaniswa kumgca wemveliso okhoyo okanye kwindawo yokusebenza ezimeleyo ukuze yenze imisebenzi yokuwelda ekumgangatho ophezulu. Ngokuhamba kwayo rhoqo nangokuchanekileyo, iqinisekisa ukuwelda okugqibeleleyo, okubangela umgangatho ophezulu wemveliso kunye neziphene ezimbalwa. Oku kuyenza ifaneleke kumashishini afana neemoto kunye neenqwelo-moya ezifuna imisebenzi yokuwelda enzima.
Ukuqukumbela, ingalo yerobhothi yemizi-mveliso ezenzekelayo itshintsha umdlalo kwicandelo le-automation. Amandla ayo aphezulu okuphatha, ukupakisha, ukuqokelela kunye nokuwelda ayenza ibe yimpahla ebalulekileyo yeenjongo ezininzi kumashishini kwiindidi ezahlukeneyo zamashishini. Ngobuchwepheshe bayo obuphambili kunye neempawu eziphambili, iqinisekisa ukusebenza kakuhle, imveliso eyonyukileyo kunye nomgangatho ophuculweyo wemveliso. Hlala uphambili kukhuphiswano kwaye wamkele ikamva le-automation ngeengalo zethu zerobhothi yemizi-mveliso ezenzekelayo.
Isicelo
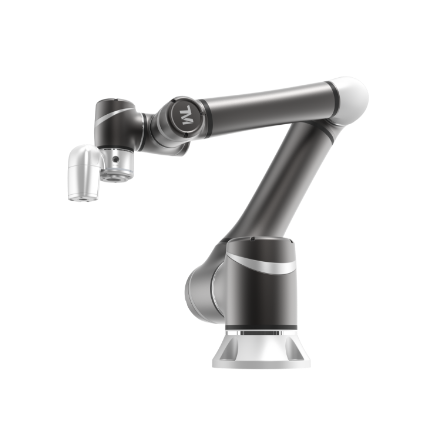
I-TM14 yenzelwe imisebenzi emikhulu ngobuchule obukhulu kunye nokuthembeka. Ngenxa yokukwazi ukuphatha imithwalo yemithwalo ukuya kuthi ga kwi-14kg, iluncedo kakhulu ekuthwaleni izixhobo ezinzima zokuphela kwengalo nokwenza imisebenzi isebenze kakuhle ngokunciphisa ixesha lomjikelo. I-TM14 yenzelwe imisebenzi enzima nephindaphindayo, kwaye ibonelela ngokhuseleko olupheleleyo ngeenzwa ezikrelekrele ezimisa irobhothi ngoko nangoko ukuba kufunyenwe unxibelelwano, zithintela nakuphi na ukwenzakala kumntu nakumatshini.
Ngenkqubo yombono ehamba phambili kudidi, iteknoloji ye-AI ephucukileyo, ukhuseleko olupheleleyo, kunye nokusebenza okulula, i-AI Cobot iya kuyisa ishishini lakho phambili kunangaphambili. Phakamisa ukwenziwa kwezinto ngokuzenzekelayo kwinqanaba elilandelayo ngokunyusa imveliso, ukuphucula umgangatho, kunye nokunciphisa iindleko.
Ukwazisa irobhothi yombane yerobhothi eguqukayo eneminwe emibini ehambelanayo ene-axis ezi-6 ezisebenzisanayo ukuze ikhethwe kwaye ibekwe kwindawo. Le mveliso intsha iya kutshintsha ishishini lerobhothi yemizi-mveliso kunye nentsebenziswano ngeempawu zayo eziphambili kunye nokusebenza okuphucukileyo.
Iigripper zerobhothi zenzelwe ukubonelela ngemisebenzi yokukhetha nokubeka engenamthungo, nesebenzayo, nto leyo eyenza ukuba zilungele amashishini afana nokuvelisa, ukugcina impahla kunye nokuhambisa izinto. Uyilo lwayo oluhambelanayo lweminwe emibini lubonelela ngokubamba okuphuculweyo, ukuqinisekisa ukubamba okukhuselekileyo kwizinto ezineemilo ezahlukeneyo kunye nobukhulu. Ibandakanya irobhothi esebenzisana nezimboni enamacala amathandathu, imveliso inika ukuguquguquka okungenakuthelekiswa nanto kunye nokuzivumelanisa nezimo, ivumela ukuba ikwazi ukusingatha imisebenzi enzima ngokuchanekileyo.
Enye yezona mpawu ziphambili zeerobhothi ezisebenzisa iigrippers kubuchule bazo bokusebenzisana. Oku kuthetha ukuba ingasebenza ngaphandle kokuphazamiseka nabasebenzi babantu ukwandisa imveliso kunye nokusebenza kakuhle emsebenzini. Igripper ixhotyiswe ngeempawu zokhuseleko zanamhlanje, kubandakanya izixhobo zombane kunye ne-torque, ukuqinisekisa ukusebenza okukhuselekileyo nokuthembekileyo kwiindawo ezisebenzisanayo. Oku kuyenza ibe yimpahla exabisekileyo kumashishini ajonge ukufezekisa intsebenziswano ehambelanayo phakathi kwabantu.
Ukongeza, i-robotic gripper ilula kakhulu ukuyisebenzisa. Ngojongano lwayo oluqondakalayo kunye nesoftware yokuprograma elula ukuyisebenzisa, abasebenzisi banokuyiseta ngokukhawuleza kwaye bayilungiselele i-fixture ukuze ihlangabezane neemfuno zabo ezithile. I-fixture ikwaxhasa iindlela ezahlukeneyo zonxibelelwano kwaye inokudityaniswa ngokulula neenkqubo ezikhoyo kunye nezixhobo.
Ukongeza, imveliso iyakwazi ukumelana neemeko ezinzima zeendawo zoshishino. Ulwakhiwo lwayo oluqinileyo kunye noyilo oluqinileyo luqinisekisa ukuqina kunye nobude bexesha, kunciphisa iindleko zokungasebenzi kunye nokugcinwa. Ukongeza, i-clamp kulula ukuyilungisa kwaye ingenziwa ngokwezifiso ngezincedisi ezongezelelweyo kunye nezinto ezifunekayo ukuze zilungele usetyenziso oluthile.
Lilonke, iRobotic Gripper Motorized 2-Finger Parallel 6-Axis Industrial Collaborative Robot for Pick and Place itshintsha umdlalo kwicandelo leerobhothi. Iimpawu zayo ezintsha, iimpawu zentsebenziswano, kunye nojongano olusebenziseka lula ziyenza ibe sisisombululo esifanelekileyo kumashishini afuna ukwandisa imveliso kunye nokusebenza kakuhle. Yamkela ikamva leerobhothi ngale mveliso ibalaseleyo.
Iimbonakalo
NGOBUCHULE
I-Cobot yakho ene-AI ikhuselekile kwixesha elizayo
• Ukuhlolwa kwe-optical okuzenzakalelayo (AOI)
• Ukuqinisekiswa komgangatho kunye nokungaguquguquki
• Ukwandisa ukusebenza kakuhle kwemveliso
• Ukunciphisa iindleko zokusebenza
KULULA
Akukho mava afunekayo
• Ujongano lwemizobo ukuze kube lula ukwenza iinkqubo
• Umsebenzi wokuhlela ojolise kwinkqubo
• Isikhokelo esilula sokufundisa izikhundla
• Ukulinganisa okubonakalayo ngokukhawuleza ngebhodi yokulinganisa
IKHUSELEKILE
Ukhuseleko oludibeneyo lubaluleke kakhulu kuthi
• Iyahambelana ne-ISO 10218-1:2011 kunye ne-ISO/TS 15066:2016
• Ukufunyanwa kwe-collison kunye nokuma okungxamisekileyo
• Gcina iindleko kunye nendawo yemiqobo kunye nocingo
• Misela imida yesantya kwindawo yokusebenza esebenzisanayo
Ii-cobot ezisebenzisa i-AI ziyaqaphela ubukho kunye nolwalathiso lwendawo ezikuyo kunye namacandelo azo ukuze zenze uhlolo olubonakalayo kunye nemisebenzi yokukhetha nokubeka izinto ngendlela eguquguqukayo. Sebenzisa i-AI ngokulula kumgca wemveliso kwaye wonyuse imveliso, unciphise iindleko, kwaye unciphise amaxesha omjikelo. Umbono we-AI unokufunda iziphumo ezivela koomatshini okanye kwizixhobo zokuvavanya kwaye wenze izigqibo ezifanelekileyo ngokufanelekileyo.
Ngaphandle kokuphucula iinkqubo zokwenza izinto ngokuzenzekelayo, i-cobot eqhutywa yi-AI inokulandelela, ihlalutye, kwaye idibanise idatha ngexesha lemveliso ukuthintela iziphene kunye nokuphucula umgangatho wemveliso. Khulisa ngokulula ukuzenzekela kwefektri yakho ngeseti epheleleyo yetekhnoloji ye-AI.
Iirobhothi zethu ezisebenzisanayo zixhotyiswe ngenkqubo yokubona edibeneyo, enika ii-cobot amandla okubona indawo ezikuyo nto leyo ephucula kakhulu amandla e-cobot. Umbono werobhothi okanye ukukwazi "ukubona" nokutolika idatha ebonakalayo ibe yimiyalelo yemiyalelo yenye yeempawu ezisenza sibe ngcono. Itshintsha umdlalo wokwenza imisebenzi ngokuchanekileyo kwiindawo zokusebenza ezitshintshayo, yenza imisebenzi isebenze kakuhle, kwaye iinkqubo zokwenza izinto ngokuzenzekelayo zisebenze kakuhle.
Yenzelwe abasebenzisi bokuqala engqondweni, ulwazi lwenkqubo aluyomfuneko ukuze uqalise nge-AI Cobot. Intshukumo yokucofa nokutsala enobuchule kusetyenziswa isoftware yethu yenkqubo yokuhamba inciphisa ubunzima. Itekhnoloji yethu enelungelo lobunikazi ivumela abaqhubi abangenamava okubhala ikhowudi ukuba bacwangcise iprojekthi emfutshane njengemizuzu emihlanu.
Izinzwa zokhuseleko ezisisiseko ziya kuyimisa i-AI Cobot xa kufunyenwe ukudibana komzimba, nto leyo enciphisa umonakalo onokubakho kwindawo engenaxinzelelo nekhuselekileyo. Ungamisela nemida yesantya serobhothi ukuze isetyenziswe kwiindawo ezahlukeneyo kufutshane nabasebenzi bakho.
Iimveliso eziNxulumeneyo



Ipharamitha yokucacisa
| Imodeli | TM14 | |
| Ubunzima | 32.5KG | |
| Umthwalo ophezulu | 14KG | |
| Fikelela | 1100mm | |
| Uluhlu oludibeneyo | J1,J6 | ±270° |
| J2,J4,J5 | ±180° | |
| J3 | ±163° | |
| Isantya | J1,J2 | 120°/s |
| J3 | 180°/s | |
| J4 | 150°/s | |
| J5 | 150°/s | |
| J6 | 180°/s | |
| Isantya Esiqhelekileyo | 1.1m/s | |
| Isantya esiphezulu | 4m/s | |
| Ukuphindaphinda | ± 0.1mm | |
| Umgangatho wenkululeko | Iijoyinti ezi-6 zokujikeleza | |
| I/O | Ibhokisi yokulawula | Igalelo ledijithali: 16 Imveliso yedijithali: 16 Igalelo le-analog:2 Isiphumo se-analog: 1 |
| Ikhonkco lesixhobo. | Igalelo ledijithali: 4 Imveliso yedijithali: 4 Igalelo le-analog:1 Isiphumo se-analog:0 | |
| Ubonelelo loMbane lwe-I/O | I-24V 2.0A yebhokisi yokulawula kunye ne-24V 1.5A yesixhobo | |
| Udidi lwe-IP | IP54 (Ingalo yeRobhothi); IP32 (Ibhokisi yoLawulo) | |
| Ukutya umbane | I-watts ezingama-300 eziqhelekileyo | |
| Ubushushu | Irobhothi ingasebenza kubushushu obuphakathi kwe-0-50℃ | |
| Ucoceko | Iklasi yesi-3 ye-ISO | |
| Ukunikezwa Amandla | I-100-240 VAC, 50-60 Hz | |
| Ujongano lwe-I/O | 3xCOM, 1xHDMI, 3xLAN, 4xUSB2.0, 2xUSB3.0 | |
| Unxibelelwano | I-RS232, i-Ethemet, i-Modbus TCP/RTU (inkosi kunye nekhoboka), i-PROFINET (ukhetho), i-EtherNet/IP (ukhetho) | |
| Indawo yoCwangciso | I-TMflow, isekelwe kwitshati yokuhamba | |
| Isiqinisekiso | I-CE, i-SEMI S2 (Ukhetho) | |
| I-AI kunye nombono*(1) | ||
| Umsebenzi we-AI | Uhlulo, Ukufunyanwa kwezinto, Ukwahlulahlula, Ukufunyanwa kwezinto ezingaqhelekanga, i-AI OCR | |
| Isicelo | Indawo, Ukufundwa kweBhakhowudi ye-1D/2D, i-OCR, Ukufunyanwa kweziphene, Ukulinganisa, Ukujonga iNdibano | |
| Ukuchaneka kokubeka indawo | Indawo ye-2D: 0.1mm*(2) | |
| Iliso lisesandleni (Elakhelwe ngaphakathi) | I-carmera yombala egxile ngokuzenzekelayo enesisombululo se-5M, Umgama wokusebenza yi-100mm ~ ∞ | |
| Iliso ukuya kwisandla (Uyazikhethela) | Xhasa iikhamera eziphezulu ze-2xGigE 2D okanye i-1xGigE 2D Camera +1x3D Camera*(3) | |
| *(1)Akukho zixhobo zerobhothi ezibonakalayo ezakhelwe ngaphakathi ezifana ne-TM12X, TM14X, TM16X, TM20X nazo ziyafumaneka. *(2)Idatha ekule theyibhile ilinganiswa yilabhoratri yeTM kwaye umgama wokusebenza yi-100mm. Kufuneka kuqatshelwe ukuba kwizicelo ezisebenzayo, amaxabiso afanelekileyo anokwahluka ngenxa yezinto ezifana nomthombo wokukhanya okwindawo, iimpawu zezinto, kunye neendlela zokucwangcisa umbono eziya kuchaphazela utshintsho ekuchanekeni. *(3)Jonga iwebhusayithi esemthethweni yeTM Plug & Play ukuze ufumane iimodeli zekhamera ezihambelana neTM Robot. | ||
Ishishini Lethu


Iindidi zemveliso
-

Isixhobo sokulawula i-telescopic seRobotic Arm Army esinde esinama-20...
-

Ixabiso leRobhothi ye-Axis Dof Industrial Welding eyi-6 Axis Dof Industrial ...
-

Intsebenziswano yeeRobhothi zeShishini le-6 Axis ze-Industrial...
-

4, 5, 6 Dof Advanced Eductional Cobot Manufactu...
-

Ibhokisi yebhokisi yebhokisi yePalletizing Stacking Bag esetyenziswa kwimizi-mveliso ...
-
I-6 Axis Industrial Automatic Welding Robot Arm S ...