UCHUNGECHUNGE LWE-HITBOT ELECTRIC GRIPPER – I-Z-EFG-C50 I-Corlaborative Electric Gripper




Udidi oluPhambili
Ingalo yerobhothi yemizi-mveliso / Ingalo yerobhothi esebenzisana nayo / Igripha yombane / I-actuator ekrelekrele / Izisombululo ze-automation
Isicelo
Iirobhothi ze-SCIC Z-EFG series grippers zincinci ngobukhulu kwaye zinenkqubo ye-servo eyakhelwe ngaphakathi, nto leyo eyenza kube nokwenzeka ukufikelela kulawulo oluchanekileyo lwesantya, indawo, kunye namandla okubamba. Inkqubo yokubamba ekhawulezileyo ye-SCIC yezisombululo zokuzenzekelayo iya kukuvumela ukuba uvule amathuba amatsha okwenza imisebenzi ngokuzenzekelayo ongazange ucinge ukuba inokwenzeka.

Uphawu

·Ukufunyanwa kwe-Gripper drop, umsebenzi wemveliso yendawo
· Amandla, indawo kunye nesantya zinokulawulwa ngokuchanekileyo ngeModbus
·Ubomi obude: amashumi ezigidi zeemijikelo, zidlula iinzipho zomoya
· Isilawuli esakhelwe ngaphakathi: indawo encinci, kulula ukuhlanganisa
·Imo yoLawulo: 485 (Modbus RTU), I/O
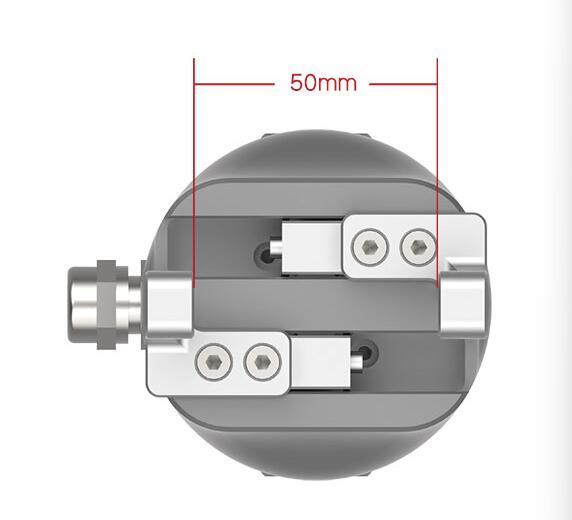
I-Stroke 50mm, i-Clamping Force 140N, ihambelana neRobhothi ye-6-axis Arm.
Ifrikhwensi ephezulu
Ixesha elifutshane kakhulu lokubetha yi-0.5s
Ubuchule obuphezulu
Ukuphinda-phinda yi ± 0.03mm
Umthwalo ophezulu
Ubunzima bokubambelela obucetyiswayo ≤2kg
Xhuma kwaye udlale
Igripha yombane ngokukodwa yengalo yerobhothi ene-axis ezi-6
Umsila Utshintshatshintsha
Umsila wayo uyatshintshatshintsha, ufanelekile kwiimfuno ezahlukeneyo
Amandla okuBamba athambileyo
Ingabamba izinto ezibuthathaka nezikhubazekileyo

● Ukukhuthaza utshintsho olukhulu ekutshintshweni kweegrippers zomoya ngamagrippers ombane, igripper yokuqala yombane enenkqubo ye-servo edibeneyo eTshayina.
● Ukutshintshwa okugqibeleleyo kwe-air compressor + isihluzi + i-solenoid valve + i-throttle valve + i-pneumatic gripper
● Ubomi benkonzo yeebhayisekile ezininzi, ezihambelana nesilinda yendabuko yaseJapan
Iimveliso eziNxulumeneyo



Ipharamitha yokucacisa
| Inombolo yoMzekelo Z-EFG-C50 | Iiparameters |
| I-stroke iyonke | I-50mm ehlengahlengiswayo |
| Amandla okubamba | I-40-140N ehlengahlengiswayo |
| Ukuphindaphinda | ± 0.03mm |
| Ubunzima obucetyiswayo bokubambelela | ≤2kg |
| Imo yokudlulisa | Irekhi yegiya + Isikhokelo esijikelezayo |
| Ukuzaliswa kwakhona kwegrisi yezinto ezihambayo | Rhoqo emva kweenyanga ezintandathu okanye isigidi seentshukumo/ixesha |
| Ixesha lokuhamba kwe-stroke yendlela enye | 0.5s |
| Imo yentshukumo | Iminwe emibini ihamba ngokuthe tye |
| Ubunzima | 1kg |
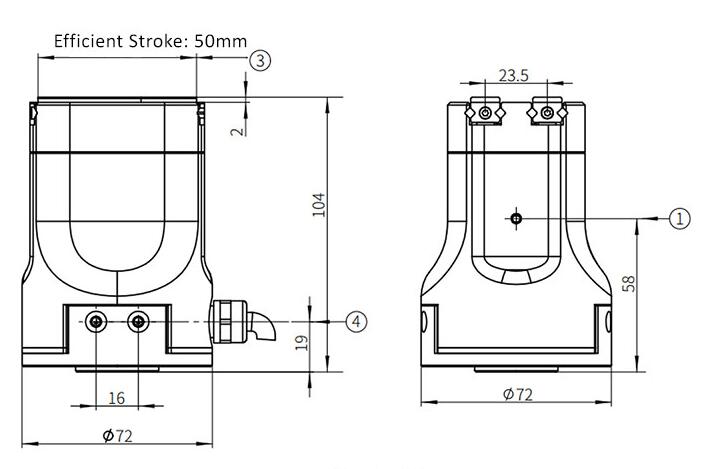
| Ubukhulu (L*W*H) | 72*72*143mm |
| I-voltage yokusebenza | 24V±10% |
| Ikaliwe ngoku | 0.8A |
| Umsinga ophambili | 2A |
| Amandla | 20W |
| Udidi lokhuseleko | IP20 |
| Uhlobo lwemoto | I-DC engenabhrashi |
| Uluhlu lobushushu bokusebenza | 5-55℃ |
| Uluhlu lokufuma olusebenzayo | RH35-80 (Akukho qhwa) |

| Umthwalo ozinzileyo ovumelekileyo kwicala elithe nkqo | |
| Fz: | 300N |
| I-torque evumelekileyo | |
| Mx: | 7 Nm |
| Eyam: | 7 Nm |
| UMz: | 7 Nm |
Ukuqhuba Okudibeneyo kunye noMlawuli
I-gripper yombane ye-Z-EFG-C50 inenkqubo ye-servo edibeneyo ngaphakathi, i-stroke yayo iyonke yi-50mm, amandla okubamba yi-40-140N, amandla ayo okubamba kunye nokubamba ayalungiseka, kwaye ukuphindaphindwa kwayo yi-±0.03mm.

Iyahambelana neSix-Axis Robot Arm

Igripha yombane ingahambelana nengalo yerobhothi ene-axis ezi-6, ukuze ifezekise iplagi kunye nokudlala, ixesha layo elifutshane kakhulu lokubetheka yi-0.5s kuphela, enokuhlangabezana nezicelo zokubambelela zomgca wemveliso ozinzileyo.
Ubungakanani obuncinci, obuguquguqukayo ukuyifaka

I-Z-EFG-C50 iza kusebenzisa indlela yokudlulisela i-gear rack + ibhola, ubungakanani bemveliso yi-L72*W72*H143mm, inokuguquguquka ukuyicwangcisa kwimeko yendawo encinci.


Ukusabela Okukhawulezileyo, Ukuchaneka Kolawulo Lwamandla

Ixesha elifutshane kakhulu lokubetha okukodwa yimizuzwana eyi-0.5 kuphela, inokujongana nomsebenzi wokubambelela ngokukhawuleza, iindawo zayo zomsila zingatshintshwa nangaliphi na ixesha, abathengi banokulungisa imisila ngokweemfuno.
Iindlela zoLawulo oluPhinda-phinda, Kulula ukuzisebenzisa

Uqwalaselo lwe-Z-EFG-C50 lulula, luneendlela ezininzi zokulawula, kuquka i-485 (Modbus RTU), iPulse, i-I/O, kwaye iyahambelana nenkqubo yolawulo ephambili ye-PLC.

Iziko Lomthwalo le-Gravity Offset
1. Isalathisi se-LED
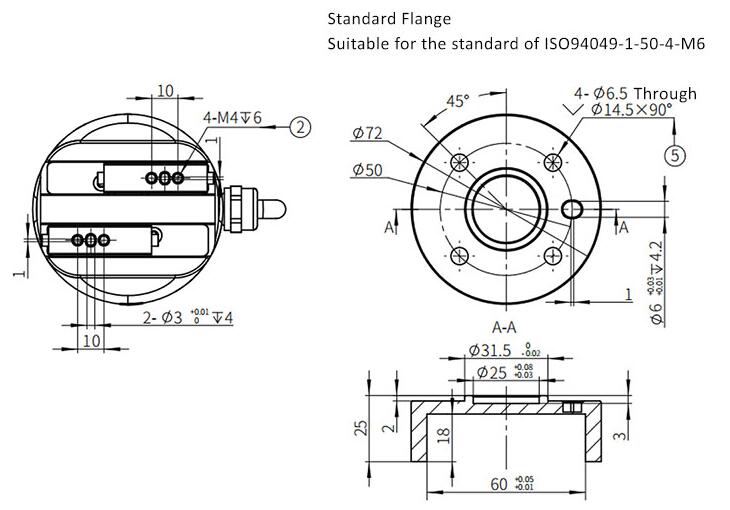
2. Indawo yokufakela, sebenzisa izikrufu ze-M4 ezine-4pcs
3. I-Stroke yegripper yombane yi-50mm
4. Indawo yokuthengisela amandongomane
5. Indawo yokufakela, sebenzisa izikrufu ze-M6 ezine-4pcs ukuze uqhagamshele kwi-terminal flange yengalo yerobhothi esebenzisana nayo
Ishishini Lethu


Iindidi zemveliso
-

Uthotho lweeRobhothi zeDH Servo Electric Gripper RGI –...
-

I-DH Robotics Servo Electric Gripper CG Series – ...
-

Uthotho lweeRobhothi zeDH Servo Electric Gripper RGI –...
-

Uthotho lwe-DH Robotics Servo Electric Gripper PGC –...
-

Iirobhothi zeDH Servo Electric Gripper PGE Series –...
-

HITBOT ELECTRIC GRIPPER SERIES – Z-EFG-12 Paral...